Julien
Présentation
Sans condensateur de découplage
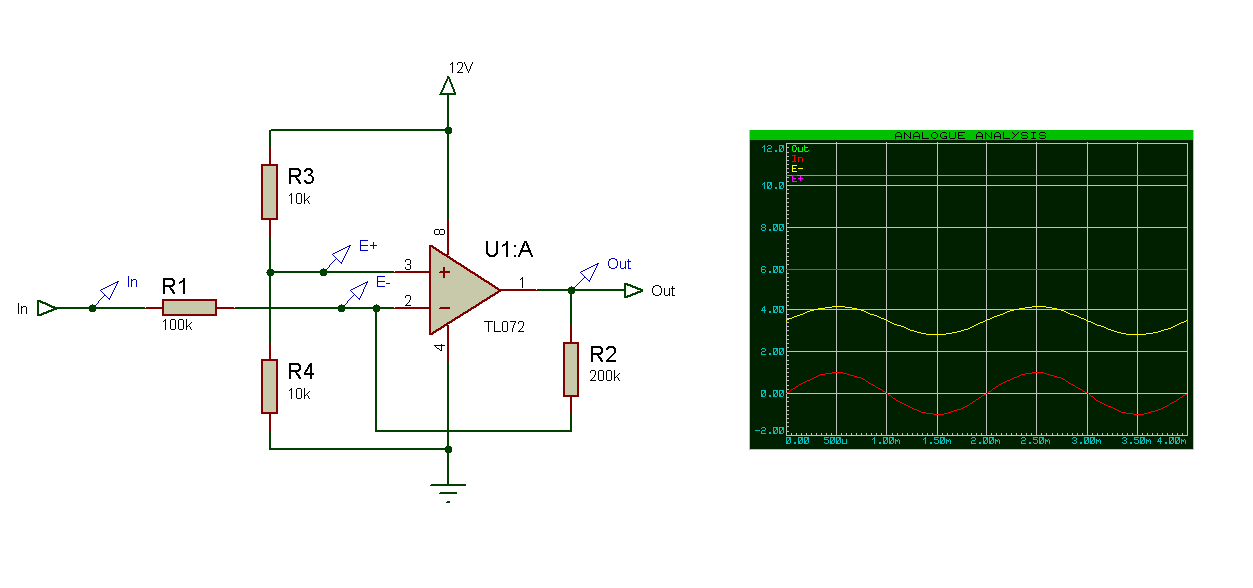
Le signal d’entrée est un signal de 1VCC (crête à crête) , ce signal est envoyé sur l’entrée inverseuse de notre AOP, la tension entre la patte inverseuse et non inverseuse doit être nul (Vd=E+-E-=0V), ce qui n’est pas le cas!! Effectivement nous intercalons, un signal sinusoïdal sur la borne inverseuse et un signal continu sur la borne non inverseuse E+ n’est pas égale à E-, l’AOP n’est pas en mesure de faire correctement son travail… (c’est comme si je vous disais “fais-le, non fais le pas, fais-le non fais le pas, vous faites quoi? vous ne savez pas , moi non plus…) Il faut donc trouver un système électronique qui permet d’imposer E+=E- sur ces 2 bornes. (il faut être sûr de ce que vous allez faire!!!)
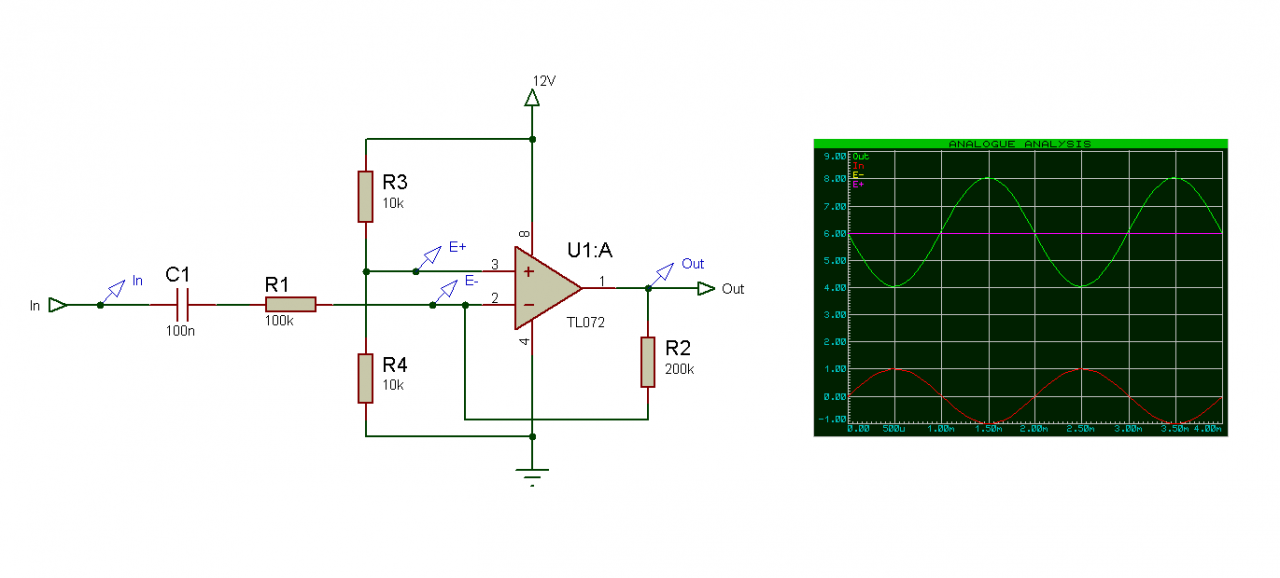
Avec condensateur de découplage

Cette fois-ci c’est bon !!, l’AOP comprend ce que nous lui demandons, car nous avons imposé une tension E+=E-, et il joue son rôle d’amplificateur. En résumé un condensateur de découplage a pour objectif de
bloquer un signal continu, pour un AOP il est important de mettre des condensateurs de découplages lorsque celui-ci travail avec de l’alternatif et du continu.
Analyses:
Synoptique A:
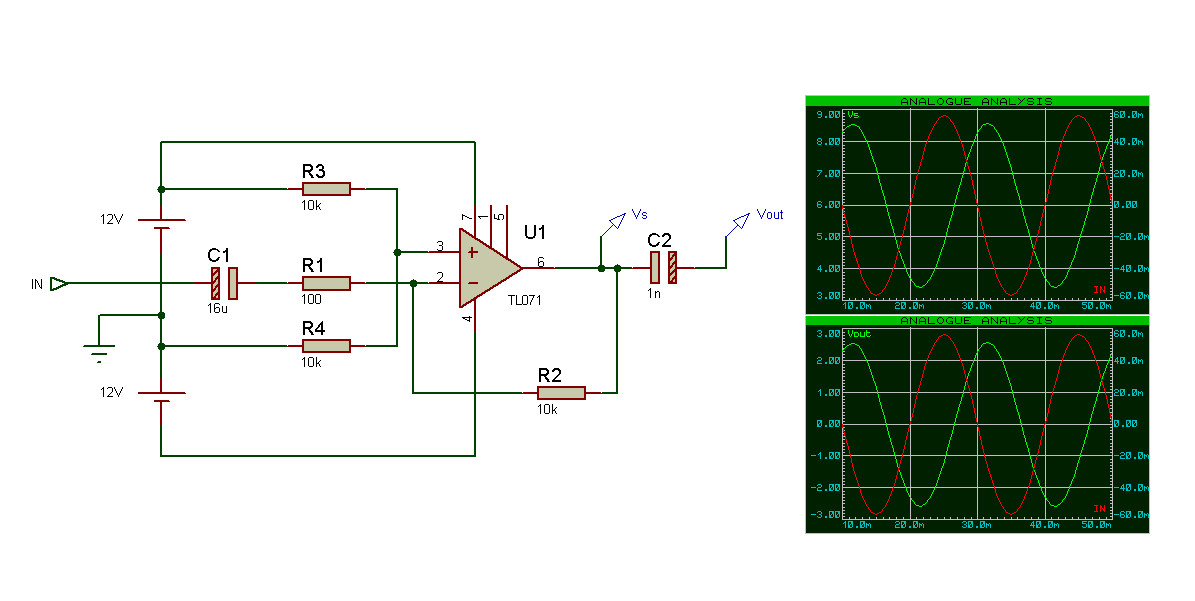
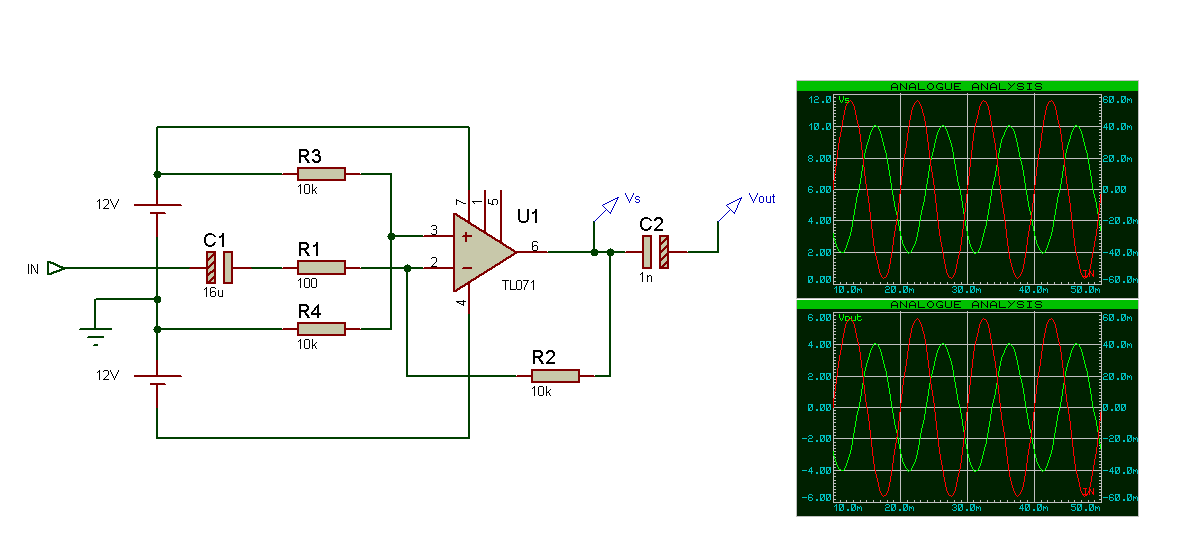
Nous mettons un signal de 40mV en entrée (IN) de 50Hz, l’impédance vue par le condensateur C1 est R1//R2
Dans ce cas de figure j’ai mis un condensateur de 16uF, pour avoir une fréquence de coupure de 100Hz, Or le gain de notre montage vue par le TL071 est de 100, ce qui veut dire que la tension de sortie est de 0.04*100=4V plus la composante continue de 6V soit 10V crête à crête heu… non?!! c’est pas ce que j’ai!! (d’après la synoptique A ce n’est pas le cas!!!).
Pourquoi?
Nous avons dimensionné le condensateur de découplage C1 pour une fréquence de coupure de 100Hz, et nous avons mis un signal de 50Hz, normal!!!le filtre passe haut prendra uniquement les fréquences supérieurs à 100Hz. En ce qui concerne le condensateur C2, lui permet d’empêcher la composante continue de passer.
Synoptique B:
Maintenant mettons 100Hz en pleine fréquence de coupure, nous voyons que le signal est bien égale à Ueff de 4V soit 10V Crête à crête puisque la valeur continue de 6V ce superpose
Le condensateur de découplage est donc très important!!!
Calculs du condensateur de découplage
Comment calculer un condensateur de découplage (ou de liaison)?
Pour déterminer un condensateur de découplage, il faut déjà connaître l’impédance de notre circuit électronique,
Le condensateur de liaison ce place en entrée du montage => il faut connaître l’impédance d’entrée.
Le condensateur de liaison ce place en sortie du montage => il faut connaître l’impédance de sortie.
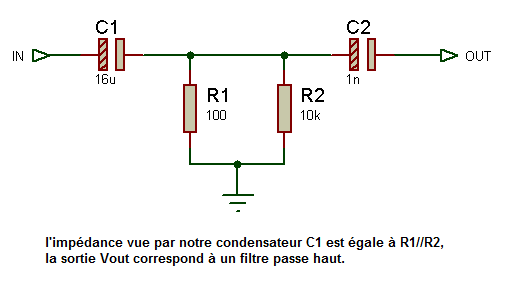
Prenons un exemple (voir ci-dessous synoptique).
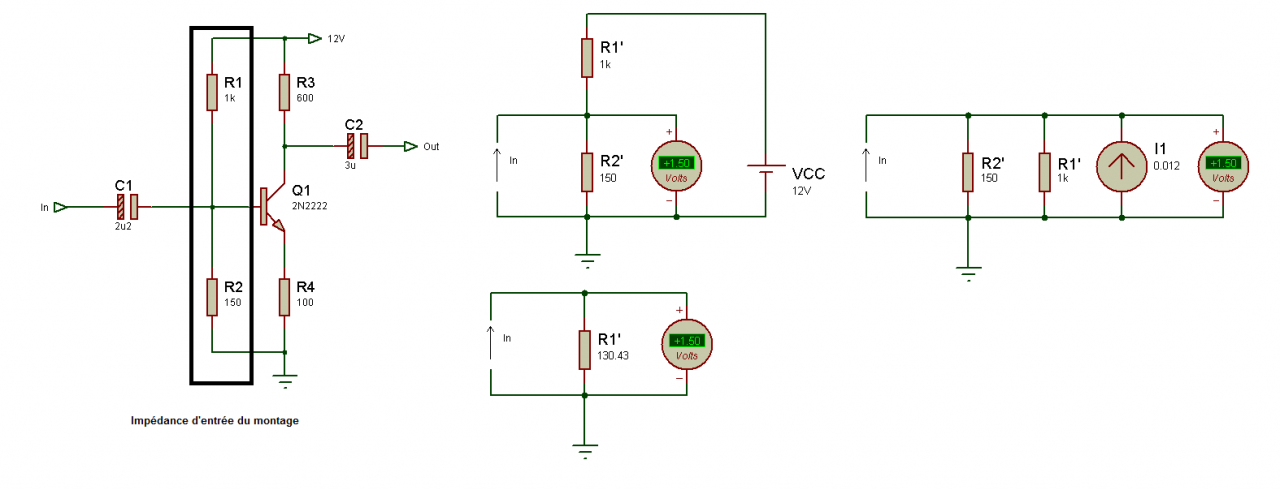
Remarque: Les valeurs des composants sont théoriques… et le condensateur de découplage en parallèle sur R4 n’est pas représenté.
Dans notre exemple, l’impédance d’entrée vue par la source (In) est de environ 150 Ohms, effectivement le théorème de Norton (que je vous invite à voir) nous démontre que l’impédance est égale à (R1//R2), soit 130 Ohms.
Quel valeur du condensateur à mettre?
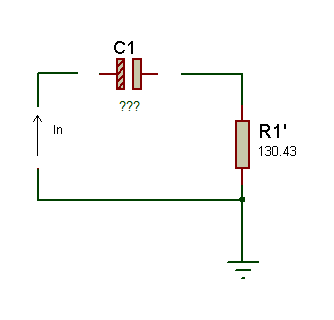
Et oui!!, il s’agit d’un filtre passe haut, avec un fréquence de coupure (Fc) => Fc=1/(2*3,14*R*C).
Si, dans notre exemple R=130 Ohms et on va dire que la Fc est de 500Hz cela nous donne un condensateur de 2u4.
En ce qui concerne la sortie cela donne (R3//R4) soit une impédance de 85 Ohms soit un condensateur de 3u7 heu…?? mais une question ce condensateur va être “accouplé” sur quoi?
Admettons que l’entrée du prochain montage électronique a une impédance de 1M ohm, ce qui nous donne aussi 85 Ohms.
Impédance d’entrée=> 130 Ohms.
Impédance de sortie=> 85 Ohms.
En règle générale, la valeur d’un condensateur de liaison placé à l’entrée d’un montage audio est assez faible, comparativement à la valeur d’un condensateur de liaison placé sur une sortie. Cela se conçoit assez aisément : l’impédance d’une entrée est généralement élevée, alors que l’impédance de sortie est en général faible. La valeur du condensateur est choisie en fonction de cette impédance, de telle sorte que la fréquence de coupure du filtre (créé par le condensateur et l’impédance) ne gêne pas le passage des fréquences audio désirées.
Forum
Question:
Voila je ne saisi pas torp commemnt on “choisi” la valeur d’un condensateur de liaison, suivant l’impedance d’entrée ou de sorties, je crois que ca ce calcule peut être que je raconte n’importe quoi mais bon… Comment calculer ca ?
Réponses
Regarde la théorie des filtres RC passe bas ,Tu as ta capa de lisaion, et l’impédance de charge en sortie (ta “R” donc), Tu en déduis Fc = 1/ (2*Pi*R*C)
Documents
Ci-dessous un lien permettant de télécharger des documents techniques
– Ares 1
– Ares 2
– Conception des circuits imprimés
Dernière mise à jour le 22/09/17
Présentation
Nous allons visualiser à l’oscilloscope la forme de la tension aux bornes d’un condensateur C1… Et nous verrons après une méthode simple pour déterminer la charge et la décharge d’un condensateur. Dans cet article, un relais alimente un circuit RC sous une tension de 9V (pile), le relais s’ouvre et se ferme à une fréquence de 0,1Hz.
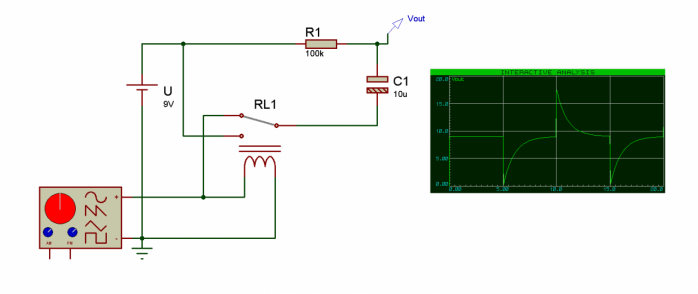
Correction: Le contact du relais (RL1) est relié à la masse et non au (+) du générateur.
1er calcul
0<t<5sec
2ème calculs
5<t<10sec

3ème calculs
15<t<20sec

Correction:
Nous avons dis que le condensateur était relié à la source subitement et qu’il était “chargé” et non “déchargé”
Calcul au secours!!
Bon !! les calculs sont quand même assez lourd pour déduire l’allure de la tension de notre condensateur.. Déduire que le condensateur va mettre un laps de temps pour arriver à être charger complétement…. Déduire Que le condensateur pour une fréquence de Hz dans combien de temps il sera déchargé …. Déduire Que en fonction de la résistance celui-ci va se chargé plus ou moins vite………. Déduire Que… Déduire Que… Déduire Que…. !!!!
C’est quand même long vous ne trouvez pas ? Puis de faire tous ces calculs à la main c’est aussi une méthode lourde. Mê peut être que dans vos souvenir vous avez déjà entendu parlé de la constante de temps nommé T (Taux) ? Si oui tant mieux sinon et bien c’est ce que nous allons voir ensemble juste après.
Constante de temps Taux
En pratique on ne considère npas une tension de niveau égale à 50% de la tension maximale mais égale à 2 points particuliers qui sont :
- 63% de la tension maximale lors de la charge;
- 37% de la tension maximale lors de la décharge;
Le temps nécessaire pour atteindre 63% de la tension maximale lors de la charge et 37% de la tension maximale lors de la décharge est appelé T “constante de temps”.
Cette formule qui permet de calculer cette constante de temps est la suivante :
T =RxC, Avec T exprimé en secondes, R en ohms et C en farads.
Pour la décharge du condensateur C dans une résistance de valeur R, la tension aura chuté à 37% de sa valeur initiale au bout d’un délai égal à la constante de temps.
Au bout d’un temps égal à 5T on considère que le condensateur est complètement chargé (ou déchargé) puisque la tension à ses bornes dépasse 99% (difficile d’être et quasi impossible à 100% puisque il s’agit d’une évolution exponentielle)
Charge à 63%
Prenons une résistance de 10 KiloOhms et un condensateur de 1 MicroFarad et le tout alimentés sous une tension de 1V.
T=RxC=10000*0,000001=0,010 soit 10ms, la constante de temps taux vaut donc 10 milliseconde.
Il en résulte que 63% de la charge du condensateur se fait en 10ms soit 63% de 1V est égale à 0,63V.
Vérifions le sur le graph.
Graph Charge à 63%
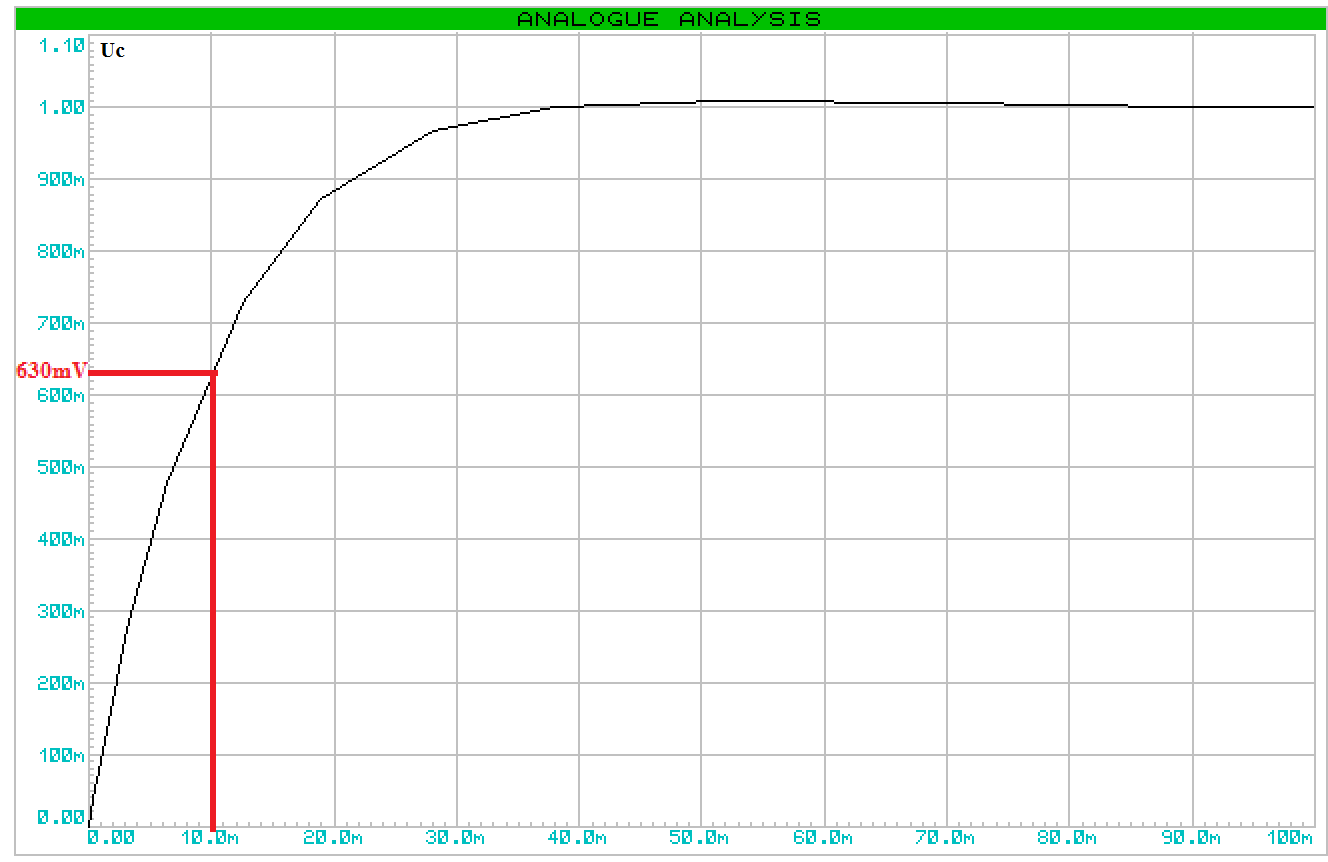
Nous avons bien 0,630V à 10ms. afin d’avoir une charge complète, il suffit de multiplier par 5 la constante de temps taux ce qui donnerais 5T =5*10000*0.000001=50ms soit 0,05sec. Effectivement, si vous regardez le graph ci-dessus vous voyez que le condensateur à 50ms (0,5sec) sa tension est d’environ 1V. (Ne chipotons pas des 1%)). Vous avez vue ce n’est pas pas si compliqué que ça la charge .
Décharge à 37%
Pas compliqué non plus si T=RxC=10000*0.000001=10ms la constante de temps taux vaut toujours 10 milliseconde puisque nous n’avons pas changé les composants n’y la tension d’alimentation. Il en résulte donc que 37% de la décharge du condensateur sera faite dans 10ms soit 37% de 1V égale à ((1*37)/100 = 37/100 = 0,37V soit 370mV et bien vérifion le encore une fois sur le graph ci-dessous
Graph décharge à 37%

Nous avons bien cette fois-ci 0,370V à 10ms afin d’avoir une décharge complète, il suffit de multiplier par 5 la constante de temps taux ce qui donnerais 5T =5*10000*0.000001=50ms soit 0,05sec. Effectivement, si vous regardez le graph ci-dessus vous voyez que le condensateur à 50ms (0,5sec) il sera presque déchargé !!
Une bobine MX c’est quoi ?
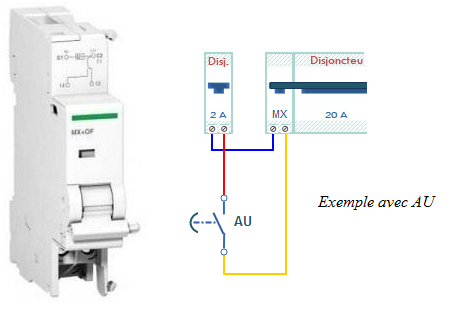
C’est un auxiliaire de commande à émission de courant plus communément appelé ” bobine MX ” sa petite sœur est la “bobine MN” qui fonctionne à rupture de courant piloté par l’ AU elle permet de faire tomber un disjoncteur ou un sectionneur. Elle peut être modulaire et associée au disjoncteur à piloter. Elle peut aussi être insérée à l’intérieure du disjoncteur (en fonction du modèle.
Bobine MX
Une bobine MX se couple à un disjoncteur. Cette bobine lorsqu’elle est alimentée agit mécaniquement sur le disjoncteur. Elle se branche comme une lampe avec un interrupteur, la phase passe d’abord par le contact (contact NO). La sortie du contact rejoint la bobine MX. L’autre borne de la bobine accueille le neutre. Dès que le contact est fermé (contact enclenché), la bobine MX est alimentée et déclenche le disjoncteur associé.
Bobine MN ((dites à manque de tension)
Une bobine MN est l’inverse de la bobine MX c’est-à-dire qui elles doivent être alimentées en permanence (dites à manque de tension pour que le disjoncteur reste enclenché. Dans ce cas le contact de l’arrêt d’urgence doit être normalement fermé (NC de l’anglais Normally Closed).
Auxiliaires électriques :
contact OF “ouvert/fermé”
indique la position des pôles du disjoncteur
contact SD “signal déclenchement”
indique que l’appareil est déclenché suite à surcharge court-circuit défaut différentiel action de la bobine MX ou MN.
Le contact SD revient à sa position de repos lors du réarmement du disjoncteur.
Déclencheur à émission de courant MX.
Il provoque l’ouverture du disjoncteur lorsque la tension est supérieure à 0,7 fois la tension nominale. L’ordre de déclenchement peut être impulsionnel (> 20 ms) ou maintenu.
Déclencheur à minimum de tension MN.
Il provoque l’ouverture du disjoncteur lorsque la tension de commande est inférieure
au seuil de déclenchement : seuil de déclenchement compris entre 0,35 et 0,7 fois la tension nominale fermeture du disjoncteur possible seulement si la tension dépasse 0,85 fois la tension nominale.Un retardateur pour MN permet d’éliminer le risque de déclenchement intempestif dû à une chute de tension fugitive de durée < 200 ms.
Fonctionnement.
Lorsque le disjoncteur a été déclenché par MN ou MX, il est nécessaire de le réarmer localement. Le déclenchement par MN ou MX est prioritaire sur la fermeture manuelle.
Lorsqu’un ordre de déclenchement est présent, aucune fermeture des contacts, même fugitive, n’est possible.


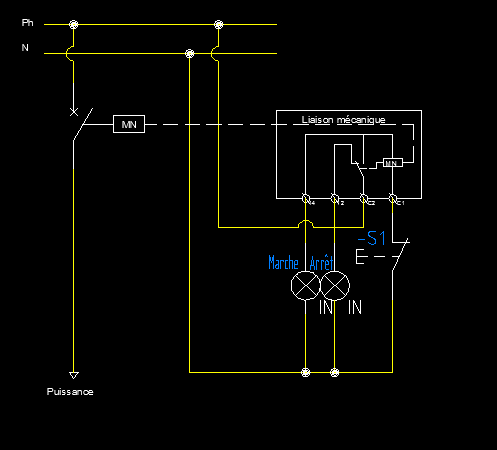
Principe de fonctionnement d’une bobine MX:
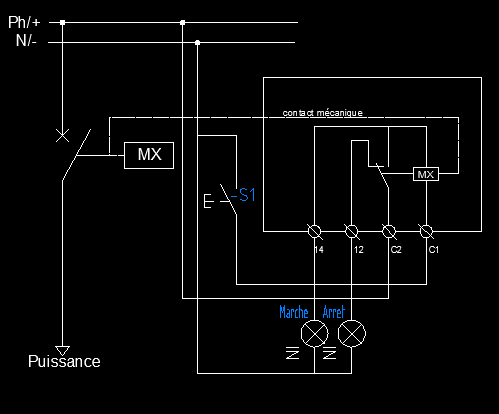
Lorsque le disjoncteur a été enclenché (à la main par exemple) par action mécanique, le voyant marche s’allume et la bobine est armée. Il est possible par le bouton S1 de déclencher le disjoncteur pusique la bobine MX (déclenchement par émission de courant) va venir ouvrir mécaniquement le disjoncteur et qui va ouvrir l’alimentation de puissance. La bobine MX, est nécessaire de le réarmer localement.
Principe de fonctionnement (interne) d’une bobine MN:
La bobine MN(manque de tension) provoque l’ouverture du disjoncteur lorsque la tension de commande est inférieure au seuil de déclenchement
le seuil de déclenchement compris entre 0,35 et 0,7 fois la tension nominale fermeture du disjoncteur possible seulement si la tension dépasse 0,85 fois la tension nominale.
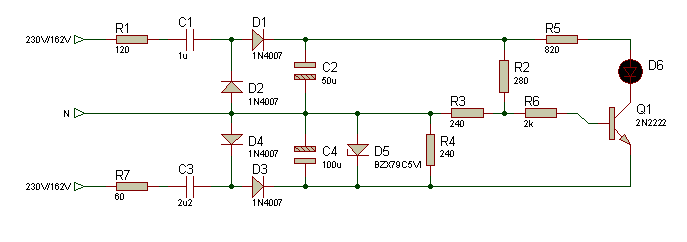
l’étude ci-dessous de notre bobine est un exemple électronique, lorsque la tension est inférieur à environ 0,7 fois la tension (par exemple 230V) soit environ 161V, la led s’eteint (ce qui correspond à la bobine qui elle s’ouvre).
Schéma électronique
Implantation des composants
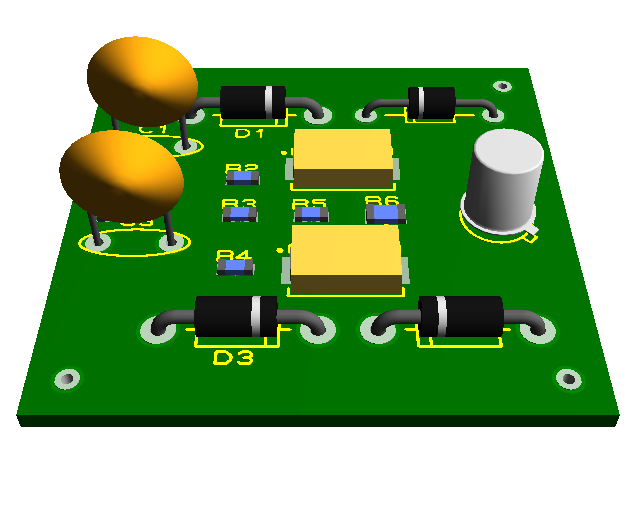
Schéma électrique
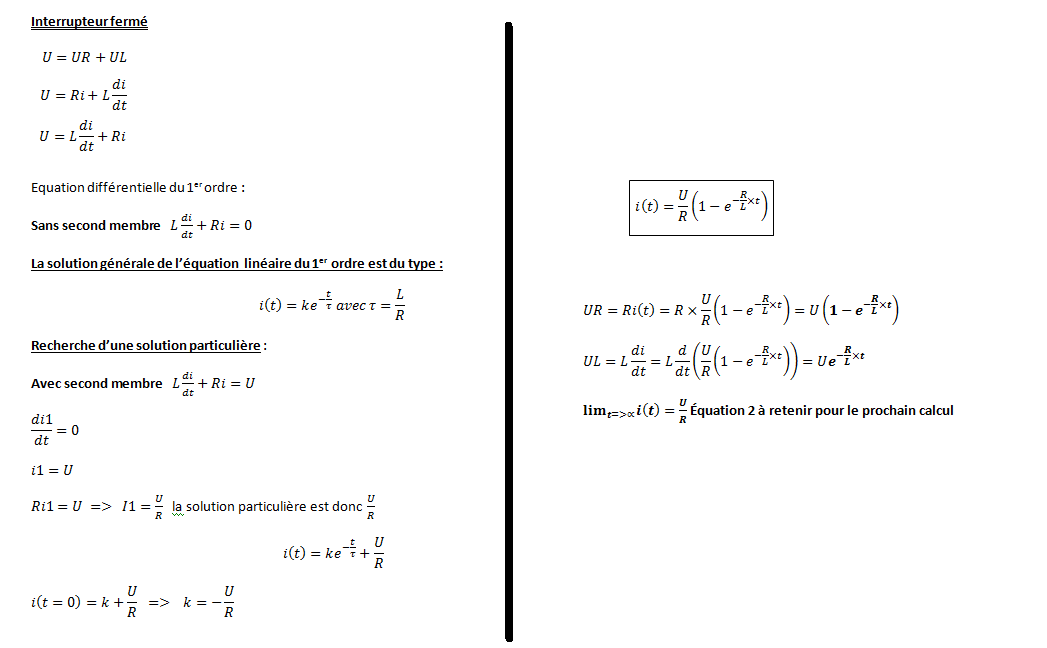
Interrupteur fermé
Interrupteur ouvert
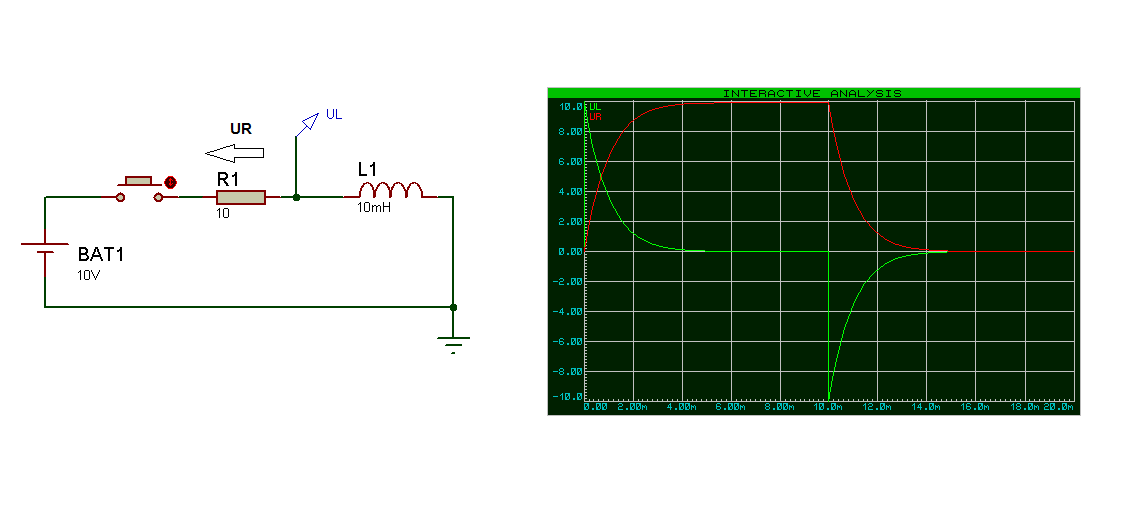

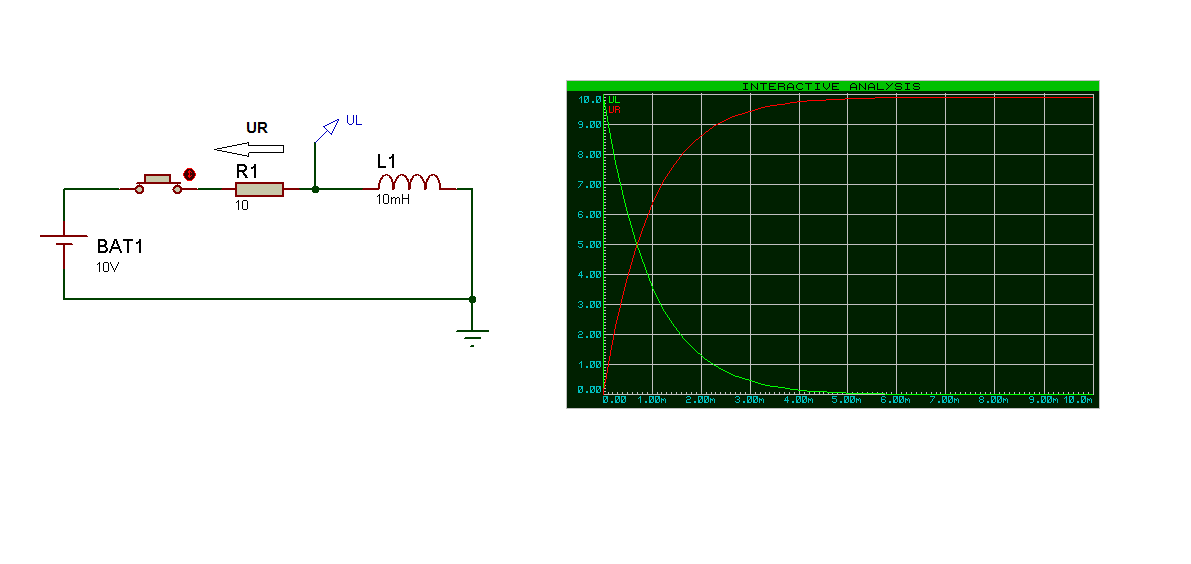
Il est utile de connaître (ou d’analyser) le comportement d’une bobine en régime impulsionnel lorsqu’elle est utilisée pour des signaux digitaux ou pour étudier ce qui se passe au moment de l’enclenchement ou du déclenchement.La forme du courant dans le circuit est identique à la tension aux bornes de la résistance car la loi d’ohm reste valable i(t) = ur(t) / R.
Notons que la tension sur la bobine à changé de polarité dès l’interruption de l’alimentation. S’opposant à la fermeture du courant, la bobine devient générateur de courant en ayant inversé la tension induite à ses bornes. Cette tension de rupture peut être extrêmement élevée et entraîner un arc électrique.
La vitesse du phénomène transitoire visible dépend de la constante de temps du circuit donné par le rapport de L avec R, exprimé par la lettre grecque Tau: t= L / R [s].
La forme du courant dans le circuit est identique à la tension aux bornes de la résistance car la loi d’ohm reste valable i(t) = ur(t) / R.
La vitesse du phénomène transitoire visible dépend de la constante de temps du circuit donné par le rapport de L avec R, exprimé par la lettre grecque Tau: t = L / R [s].
Nous parlons de phénomènes transitoires et pouvons les mesurer avec un signal de “saut à l’unité”, ou simplement en situation de ON -OFF (interrupteur).
Effectivement la tension aux bornes de l’ensemble (R et L) à l’instant de l’ouverture de l’interrupteur UR+UL=10-(-10)=20V!!! (surtention)
Diode de roue libre
Pour palier à ce phénomène, nous allons mettre une diode de roue libre en parallèle du circuit RC pour ne JAMAIS interrompre le courant dans une bobine et éviter les surtentions.
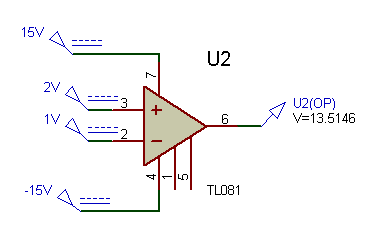
Fonctionnement en mode comparateur
Très souvent, un AOP ne pourra pas évoluer de -E à +E. La sortie d’un AOP est un montage push-pull à transistors bipolaires ou MOS. Surtout dans la technologie bipolaire, ces transistors provoquent une tension de déchet qui fait que l’AOP ne peut atteindre les plages d’alimentation. Les tensions extrêmes maximales que peut sortir l’AOP n’atteignent pas les valeurs des tensions d’alimentation. Selon les modèles, une différence de 2 V peut être observée (dans ce cas, avec une alimentation +/-15 V, la tension en sortie de l’AOP ne pas excéder +/-13 V), il faut savoir que cela peut constituer une limitation gênante dans certaines applications, notamment quand l’alimentation se fait par pile. A titre d’exemple, un TL081 alimenté en +/-15V ne donnera que +/-13V en sortie. De plus, il n’est pas rare que ces tensions ne soient pas symétriques.
La chute de tension aux bornes des deux transistors montés en push-pull est de 0,7V 0,6V environ sur chaque borne soit 1,4V à 1,2V à retirer de l’alimentation (cela reste aussi théorique mais donne une bonne approche de l’alimentation à utiliser).
Pour des faibles tensions proches du millivolt, cela se complique.
Fonctionnement en mode amplificateur
Nous venons de voir précédemment que nous devons retirer 1,4 ou 1,2V en sortie car l’AOP ne sature pas avec Vsat=Vcc.
En régime alternatif, cela est un peu différent puisque si on utilise une alimentation comprise entre le pole positif de l’alimentation et le zéro (pile par exemple), il est très difficile d’obtenir une tension négative avec une alimentation comprise entre le + et le 0V.
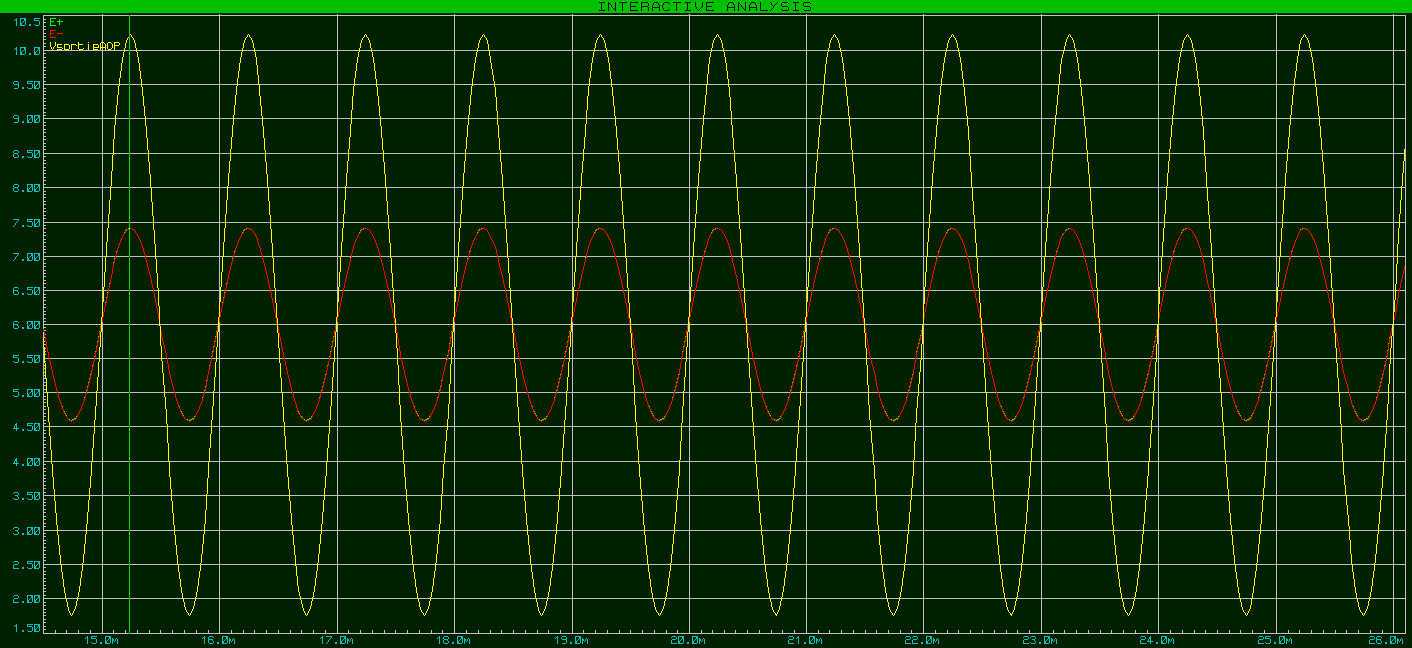
Le remède est le suivant, les résistances R1 et R2 sont ici pour fixer l’impédance d’entrée à environ 5K Ohms, mais aussi de permettre de fixer le potentiel à E+=E-=4,5V (si la tension d’alimentation est une pile de 9V), pour que la tension alternative ne soit pas « rabotée». Ainsi si nous disposons d’une tension sinusoïdale en entrée de 1V efficace, celle-ci sera en définitive de valeur moyenne de E+=E-=4,5V avec une valeur crête de E+=E-=5,91V positif et de E+=E-=3,086V efficace en négatif (voir ci-dessous).
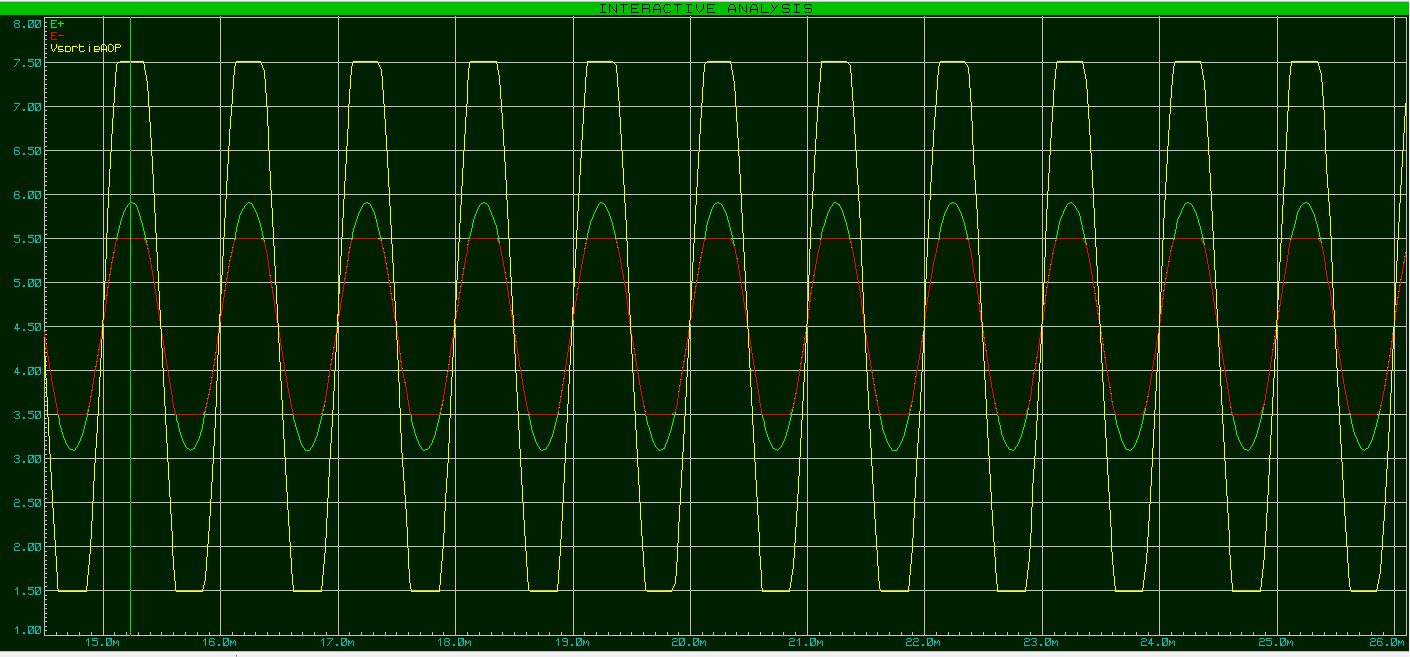
(Clique pour agrandir)
Si on interprète les mesures, d’un seul coup d’œil on aperçoit une saturation en sortie, pourquoi ?
La réponse est simple, nous avons en entrée une tension de 1V efficace qui la dessus va venir s’ajouter la valeur moyenne de E+=E-=4,5V, l’amplification a un gain de 3, la via le rapport de tension est donc 3 (attention R3=100K et R4=200K!! erreur sur le schéma) fois supérieure et si on ajoute la valeur moyenne nous avons :
VsortieAOP=(1*3)+4,5=7,5V puisque l’alimentation est sous 9V la tension sature à VsortieAOP=9-1,5=7,5V !! Aïe en plein dans la zone de saturation
Et bien dans ce cas de figure que faire ? Pas beaucoup de solution…. alors augmentons la valeur de la tension d’alimentation à 12V.
La tension moyenne sur E+= 12/2 = 6V fixe bien évidemment E-=6V.
VsortieAOP=(1*3)+6=9V puisque l’alimentation est sous 12V la tension sature à VsortieAOP=12-1,5=10,5V ce qui est mieux vous trouvez pas ?
(Clique pour agrandir)
Courants de polarisation
Afin de minimiser les écarts entre les deux entrées, on veillera à ce que celles-ci “voient” les mêmes impédances.
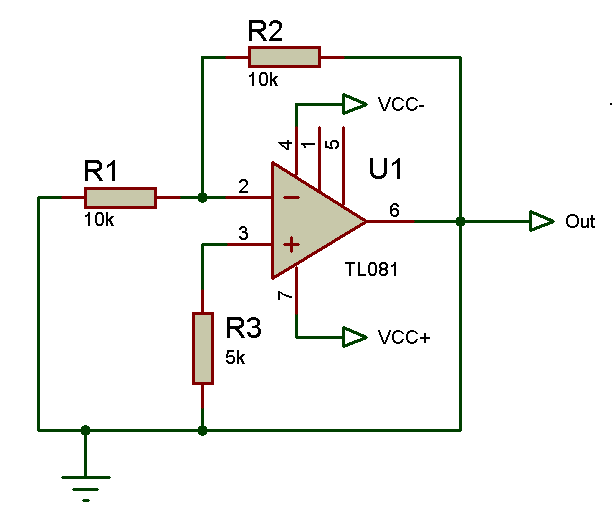
Pour le montage amplificateur inverseur, une compensation fréquente des effets des courants de polarisation est la suivante :

(Clique pour agrandir)
C’est exemple montre un montage inverseur auquel on a rajouté une résistance entre l’entrée + et la masse. Cette résistance est égale à R1//R2, soit l’impédance vue par l’entrée -. Les deux entrées “voient” les mêmes impédances, les effets des courants de polarisation vont donc se compenser.
Bien comprendre
Un AOP (AIL) doit avoir théoriquement E+=E- lorsque la sortie est reliée sur la borne inverseuse (E-). Puis les courant I+=I-, voila un AOP digne de ce nom.
Tension d’entrée tenson de sortie en court-circuit (attention c’est théorique ne pas le faire !!!)
Mettons l’entrée E+ et E- à la masse ainsi que la tension de sortie, l’AOP ne voit aucune tension d’entrée et aucun courant. Pour lui il se dit « je suis équilibré » la tension E+=E- et les courants I+=I-vous en pensez quoi ?
Analysons ensemble la figure A:
Figure A
Raisonnons courant
Théoriquement le courant i-=0A, or L’entrée inverseuse est relié à la masse par la résistance R1 et la résistance R2 relié à la sortie qui elle est à la masse, le modèle équivalent (modèle de norton) peut être représenté comme la figure B
Figure B

En ce qui concerne le courant I+ lui est nul I+=0A
Raisonnons tension
La tension E- s’exprime par E-=(R1//R2)*I-
La tension E+ s’exprime par E+=R3*I+
Conclusions
Si E+=E- alors R1//R2*I-=R3*I+
Et comme I-=I+= alors R1//R2*I-=R3*I-
Tous simplement R3=R1//R2
Présentation
Les Nickel Cadmium
Ils sont plus particulièrement aujourd’hui réservés aux appareils qui demandent des consommations de courant importantes. Malheureusement les jours du Ni-Cd sont comptés. Depuis 1er juillet 2006 une directive Européenne interdit la commercialisation dans le grand public d’éléments d’accus contenant du Cadmium.
Le Nickel Métal Hydride
Le Ni-Mh est aujourd’hui la technologie ayant un rapport qualité prix longévité le meilleur.
Les seuls défauts majeurs de cette technologie comparée au Ni-Cd sont :
Sa résistance interne plus élevée qui oblige à effectuer une phase de rodage des éléments lorsqu’on a besoin de leur faire débiter de forts taux de courant.
Sa fragilité, car le Ni-MH ne supporte pas la surcharge, ce qui oblige à utiliser des chargeurs automatiques beaucoup plus performants qu’avec le Ni-Cd.
L’utilisation de chargeurs intelligents impose de charger rapidement des accus Ni-MH (Temps de charge entre 1h et 5h) pour que la détection de fin de charge se fasse correctement
Le déroulement de la charge
La charge des accus au Nickel doit se faire à courant constant sous une tension minimale disponible d’au moins 1,45 V (Ni-Cd) à 1,6V (Ni-Mh) par élément. En dessous de cette tension minimale l’accu ne se chargera pas complètement.
Durant la charge la tension de la batterie va augmenter d’abord rapidement puis plus lentement en marquant un palier de tension. Enfin la tension va ré augmenter jusqu’à atteindre un maximum de tension. Là, la tension va cesser d’augmenter. La charge est alors terminée.
A partir de là, si la batterie reste alimentée avec le même courant : Il y aura surcharge. Comme l’accumulateur ne peut plus stocker d’énergie, toute la puissance qui lui est transmise est dégagée en chaleur. L’élément s’échauffe alors. Il y a, à ce moment là, la production d’hydrogène et d’oxygène dans les éléments.
Le début d’élévation de la température de l’accu va faire légèrement diminuer sa résistance interne et provoquer une petite baisse de tension aux bornes de l’accu. C’est cette baisse de tension que l’on appelle le Delta peak ou -DV ou delta V.
Les quatre termes “Delta Peak”, “-dV/dt” ou “DV” ou “Delta V” indiquent cette variation de la tension de l’accu qui devient négative après la fin de la charge.
La valeur du Delta peak est d’environ 15mV pour le NiCd mais de 8 mV pour le NiMh.
Il faut bien avoir à l’esprit que le but est de couper la charge au plus près du sommet de la courbe de charge. Donc détecter au plus tôt la fin de charge pour éviter, autant que faire ce peu, la surcharge qui est créatrice d’effet mémoire pour les deux technos et destructrice pour le NiMh.
Les chargeurs dernier cri à base de processeur s’attachent à détecter le sommet de la courbe pour arrêter la charge au bon moment
La question que beaucoup se posent
Pour calculé un temps de charge, si on utilise un chargeur ( si on peut appeler ça un chargeur) basique livré avec les répliques cheap.
Capacité de la batterie : par le courant de charge= temps de charge.
Exemple :1000mA : 500mA = 2 heures de charge
Une rumeur court sur le net au sujet d’un coefficient de 1,4. Donc ça nous donne 2,8 heures de charge. Il est évident que je suis contre l’application de ce coefficient qui donne un résultat empirique. Trop de variable.
Les différentes vitesses de charge
La charge normale
La charge normale se fait au taux de C/10. C étant la capacité de l’accu.
A ce taux :
– le delta peak se détecte bien pour le Ni-Cd mais difficilement pour le Ni-Mh.
La charge accélérée
La charge accélérée se fait au taux de C/5.
A ce taux :
– le delta peak est détecté pour les deux technologies.
– La surcharge est altérante pour les éléments.
La charge rapide
La charge rapide se fait au taux de 1C.
A ce taux :
– le delta peak est très bien détecté par les deux technologies.
– la surcharge est destructrice pour les éléments.
La charge ULTRA rapide
La charge ultra rapide se fait au taux de 2C
A ce taux :
– le delta peak est très bien détecté par les deux technologies.
– la surcharge est extrêmement destructrice pour les éléments.
Comment bien recharger mon accumulateur ?
Une seule solution : Pour bien charger vos accus il faut un bon chargeur.
La durée de vie de vos batteries sera essentiellement proportionnelle à la qualité de votre chargeur.
Le problème c’est qu’un bon chargeur c’est cher, voire très cher.
Donc tout dépend de l’utilisation que vous faites de vos accus. Si elle est intensive, vous avez tout intérêt à investir dans un chargeur de qualité.
On distingue donc en gros cinq types de chargeurs
Les chargeurs de base, lents et peu cher :
Ils se présentent souvent sous la forme d’une super-prise sur laquelle on vient enficher les éléments d’accus. Ce sont des chargeurs simples qui souvent chargent l’accu tant qu’il reste branché à 1/10ème du courant nominal. Avec ce genre de chargeur il y a un risque de surcharge, car la charge est conseillée en 14h mais il n’y a pas de coupure automatique. L’avantage ils ne sont pas chers mais les accus entretenus avec auront une espérance de vie limitée. Bien que ça fonctionne ces chargeurs sont à déconseiller pour la technologie NiMh et ils sont générateurs d’effet mémoire pour le Ni-Cd.
Les chargeurs en temps rapides sans déchargeurs :
On trouve de plus en plus ces petits chargeurs, qui ressemblent aux précédents. Mais ceux ci se coupent automatiquement au bout du temps théorique de charge d’un accu préalablement vidé. Généralement ces chargeurs chargent en quelques heures (2 à 5). Donc inutile de vous dire que là aussi il y a un fort risque de surcharge. Si vos accus ne sont pas vidés quand vous les mettez en charge, ils seront en surcharge à la fin du cycle du chargeur. Et comme le courant de charge est beaucoup plus élevé que dans le cas précédent, l’effet de surcharge est plus dévastateur. Pour le NiCd il y a création d’effet mémoire et vieillissement prématuré. Pour le NiMh il y a destruction partielle des éléments.
Ces chargeurs sont appelés les ‘TUEURS de Ni-Mh’…
Les chargeurs en temps avec déchargeurs :
Ces chargeurs décharge l’accu avant de le charger. Il applique alors un temps de charge correspondant au taux du courant de charge. La décharge préalable permet d’éviter la surcharge en fin de cycle, comme pour les chargeurs précédents. On trouve souvent ce genre d’appareil livré avec les caméscopes. La charge est de bonne qualité mais elle impose une décharge systématique, qui forcément use la batterie de façon inutile.
Les chargeurs à détection de fin de charge :
Là on entre dans les chargeurs évolués qui sauront recharger votre accu sans décharge préalable inutile et qui garantiront une très bonne qualité de charge sans surcharge. Certain appliquent en fin de charge un courant d’entretien qui permet d’affiner la charge de l’accu et compenser l’auto décharge.
Les chargeurs haut de gamme :
Qui regroupent toutes les fonctions précédentes, ils proposent des modes d’entretiens des accus avec des cycles de charge et décharge enchainés. Ils sont généralement équipés d’un affichage LCD pour afficher les menus et les mesures, et sont parfois capables d’envoyer des fichiers vers un PC via une liaison RS232.
Attention, pour les charges accélérée et rapide :
si vous ne possédez pas un chargeur à détection et coupure automatique de la fin de charge ( delta peak ), La batterie doit être impérativement complètement déchargée avant la charge. Pour la charge Ultra rapide, la détection de fin de charge automatique est absolument indispensable.
Seuil minimum de décharge
Quand on parle de décharger complètement une batterie cela sous entend bien sûr de ne pas descendre en dessous de 1 V / élément.
Ceci est la tension minimum en dessous de laquelle l’élément ne doit jamais descendre sous peine de destruction partielle, voire complète. Cette tension est une valeur de tension à vide, donc sans débit. Quand la batterie fourni un fort courant la tension peut descendre à 0,8V par élément pendant la décharge.
Pour une décharge optimale, il faut se conformer aux indications données par le constructeur en fonction de la technologie et des caractéristiques de l’accu. En fonction de leur technologie les accus peuvent débiter plus ou moins de courant pour une même capacité.
Par exemple, à capacité équivalente, un accu Ni-Cd sera capable de débiter beaucoup plus de courant qu’un accu Ni-MH.
La résistance interne
Plus la capacité est élevée plus la résistance interne est faible. Les accus Ni-Mh ont en moyenne une résistance interne un peu supérieure au Ni-Cd. Ceci destine donc cette technologie aux applications nécessitant des appels de courant importants.
Mais la résistance interne dépend aussi beaucoup du modèle de l’accu, en gros, de sa qualité de fabrication. A cause de cela il est pratiquement impossible de donner des valeurs moyennes génériques. Il faudra regarder la valeur au cas par cas. Dernière remarque cette valeur n’est pas toujours fournie par le fabricant, surtout dans les modèles grand public, donc méfiance si c’est un critère important pour votre application.
En fonction de la valeur du courant de décharge, la tension de l’élément va diminuer.
Cette diminution de la tension nominale quand on fait débiter de forts courants aux accus est liée à la résistance interne des éléments au Nickel. Comme tout générateur d’électricité un accu présente une résistance interne due à ses composants chimiques et aux réactions qu’ils génèrent. Un accu n’est malheureusement pas un générateur parfait. Cette résistance interne est plus faible pour la technologie Ni-Cd que pour la technologie Ni-MH. C’est pour cela que la technologie Ni-Cd est préférée au Ni-MH pour les applications demandant de fort courants, comme les outils électro-portatif ( perceuses sans fil et consort)
* Résistance Interne d’un accu Ni-Cd : 50 à 200 mΩ
* Résistance Interne d’un accu Ni-MH : 200 à 300 mΩ
Ceci est traduit mathématiquement par la loi de Pouillet :
U = E – r x I
avec :
* U : tension aux bornes de l’accu
* E : Tension à vide (sans débit) de l’accu
* r : Résistance interne de l’accu
* I : Courant débité par l’accu
Les différentes catégories de SSI
Cinq catégorie de SSI
Les systèmes de sécurité incendie sont classés en 5 catégories : A, B, C, D et E, par ordre d’exigence décroissante.
Ces catégories sont déterminées, principalement, par le type d’établissement dans lequel le SSI doit être installé, et par l’effectif du public et du personnel que peut accueillir cet établissement.
Le SSl de catégorie A (5)
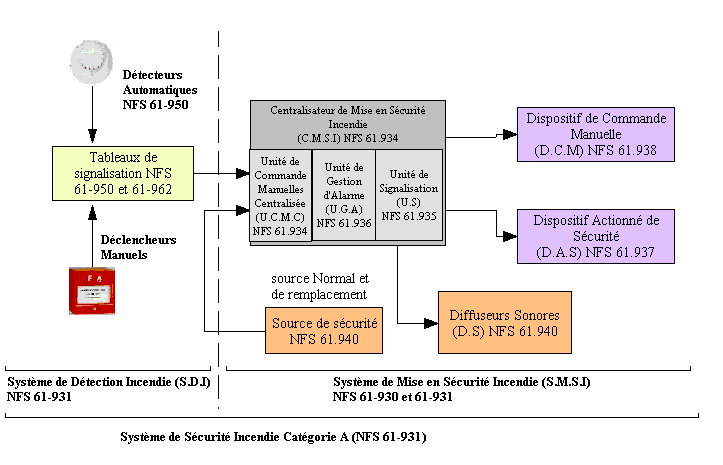
C’est le plus complet, il comporte:
Un SDI (système de détection incendie) avec:
– Des détecteurs automatiques
– Des déclencheurs manuels
– Un tableau de signalisation
Un SMSI (système de mise en sécurité incendie) avec:
– Un CMSI (centralisateur de mise en sécurité incendie), qui remplace l’ancien “coffret de relayage”, constitué:
– D’une US (unité de signalisation) assurant la signalisation de l’état des organes commandés et de la surveillance de leurs liaisons au CMSI
– D’une UCMC (unité de commandes manuelles centralisées) notamment pour permettre le forçage du désenfumage dans l’esprit de l’instruction technique n° 247
– D’un équipement d’alarme (EA) constitué d’une UGA (unité de gestion d’alarme) permettant de gérer et de déclencher le processus d’alarme par des diffuseurs sonores répartis dans l’établissement.
les DAS (dispositifs actionnés de sécurité), le module de commande et surveillance pouvant être incorporé au CMSI ou déporté près de l’organe commandé éventuellement, des DCM (dispositifs de commande manuelle), par exemple des tirez-lâchez, pouvant commander directement un ou plusieurs DAS éventuellement des DAC (dispositifs adaptateurs de commande), assurant cette dernière malgré la disparité des sources d’énergie entre DAS et CMSI (ex. électrique pneumatique). Le SSI de catégorie A doit être alimenté par deux sources:
– Une source normale ou de remplacement : secteur, groupe électrogène de sécurité, onduleur.
– Une source de sécurité source secondaire dont l’autonomie est définie par les normes.
Le SSI de catégorie B (4)
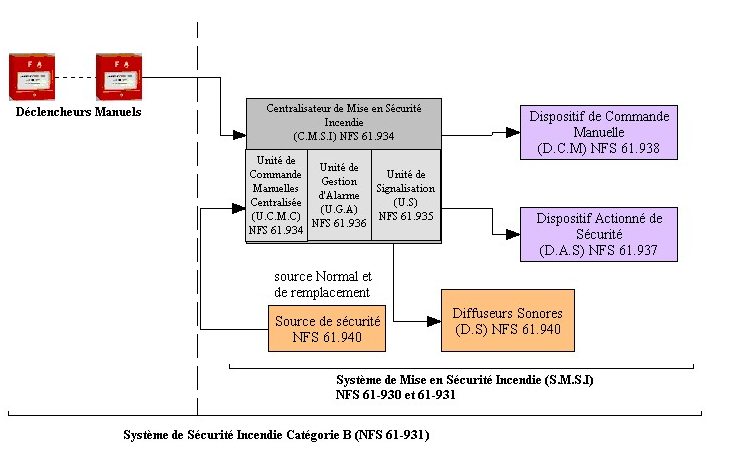
Il est identique au SSl de catégorie A, cependant il ne comporte pas de SDI (système de détection incendie), la commande étant assurée par de simples déclencheurs manuels raccordés directement au CMSI (centralisateur de mise en sécurité incendie)
Le SSI de catégorie C (3)
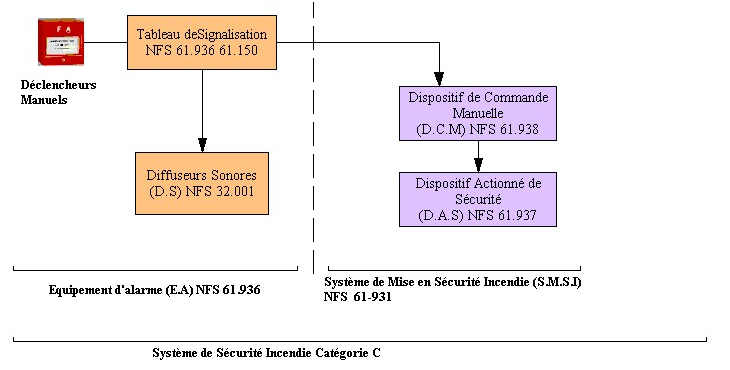
Les systèmes sont composés de deux parties:
- L’EA (équipement d’alarme) constitué de :
– Déclencheurs manuels
– Blocs autonomes d’alarme sonore
– Diffuseurs sonores
les DAS (dispositifs actionnés de sécurité) éventuellement un élément de commande-signalisation. Dans !e cas du SSI de catégorie C, cet élément est un DCS (dispositif de commande avec signalisation), organe regroupant dans un même boitier. un DCMR (dispositif de commandes manuelles regroupées) pour la mise en route manuelle des DAS à partir d”un point central et disposant d”une entrée reliée à l’équipementd’alarme pour le déclenchement automatique sur alarme d’un ou plusieurs DAS qui restent actionnables individuellement une US (unité de signalisation) assurant la surveillance de l’état des organes commandés. Le SSI de catégorie C doit être alimenté par deux sources dont une de sécurité.
Le SSI de catégorie D (2)
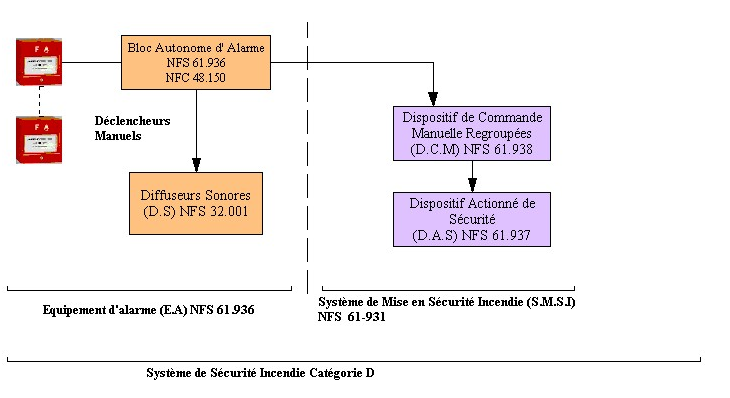
- Le SSI de catégorie E comporte
– Un EA (équipement d’alarme)
– Déclencheurs manuels
– Bloc autonome d’alarme
– Diffuseurs sonores
Des DAS (dispositifs actionnés de sécurité) actionnés directement par des DCM (dispositifs de commande manuelle). Comme le précédent, les blocs autonomes d’alarmes peuvent éventuellement assurer la commande d’un au plusieurs DAS (disposïtifs actionnés de sécurité).
Pour les E.R.P.
Equipement d’alarme TYPE 1
Le Système de Sécurité Incendie de catégorie A est le système d’alarme incendie le plus complet. Il correspond au système d’alarme de type 1.
Les systèmes d’alarme type 1 se composent d’un SDI (Système de Détection d’Incendie) qui peut être relié à un CMSI (Centrale de Mise en Sécurité Incendie)
C’est le seul type d’équipement d’alarme qui peut comporter des détecteurs automatiques d’incendie (ou DAI).
Le système d’alarme du type 1 doit utiliser :
– Des dispositifs à commande automatique (détecteurs automatiques d’incendie) ;
– Des dispositifs à commande manuelle ;
– Un tableau de signalisation ;
– Une source d’alimentation de sécurité ;
– Des diffuseurs de l’alarme générale qui peuvent être des blocs autonomes.
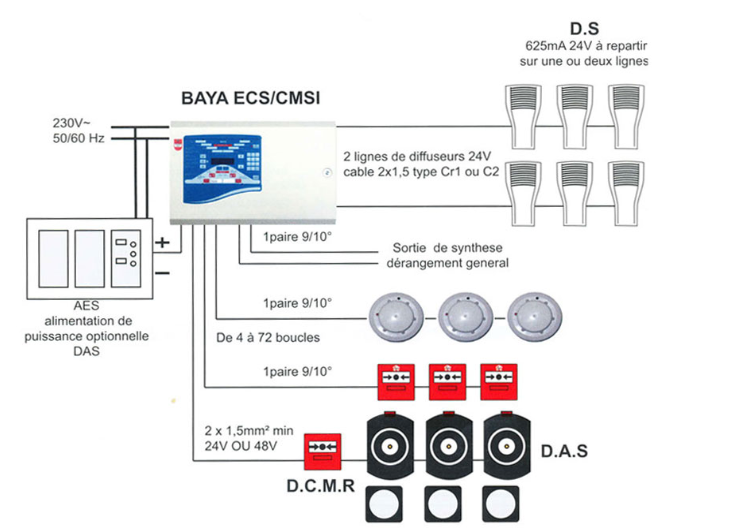
Equipement d’alarme TYPE 2a
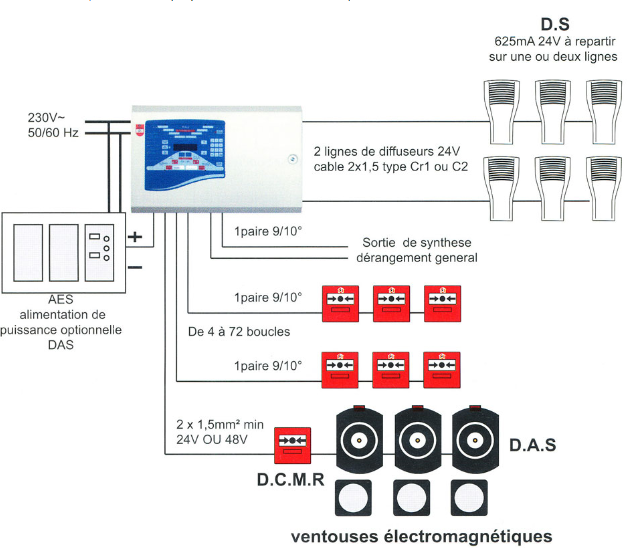
Les systèmes d’alarme type 2a se composent d’un CMSI (Centralisateur de Mise en Sécurité Incendie) relié à plusieurs boucles de déclencheurs manuels, et à des DAS (Dispositifs Actionnés de Sécurité) et des DS.
Equipement d’alarme TYPE 2b
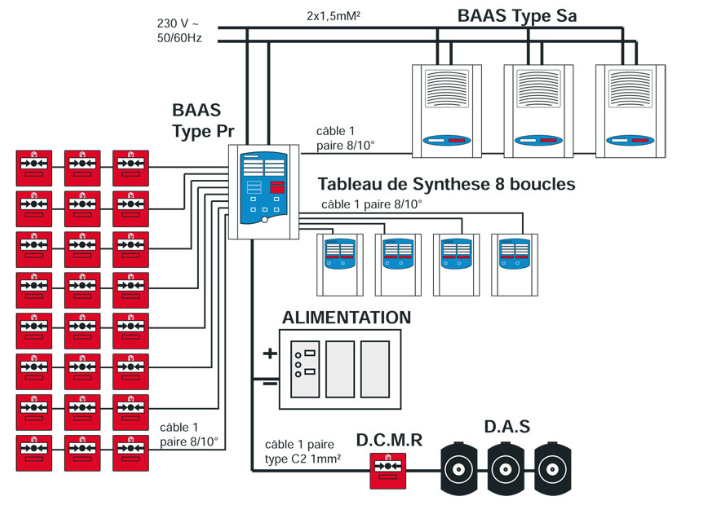
Les systèmes d’alarme type 2b sont équipés avec un BAAS type Pr : c’est un BAAS qui intègre un panneau de commande qui gère jusqu’à huit boucles de déclencheurs manuels, et parfois un contact auxiliaire pour un DAS.
Un BAAS Pr ne peut être raccordé qu’à des BAAS et non des DS.
Les Blocs Autonomes d’Alarme Sonore (BAAS) du type Pr sont spécialement étudiés pour la protection des personnes dans des établissements nécessitant un système de sécurité incendie de catégorie C, D ou E.
Ils assurent un contrôle automatique régulier de leurs fonctionnalités principales
Equipement d’alarme TYPE 3

Les systèmes d’alarme type 3, se composent d’un ou plusieurs BAAS (Blocs Autonomes d’Alarme Sonore) reliés entre eux, et qui peuvent gérer chacun une boucle de déclencheurs manuels.
Les BAAS comportent chacun un diffuseur sonore et une batterie pour pouvoir fonctionner en cas de coupure de l’alimentation “secteur”.Ils sont reliés entre eux de façon ce que lorsqu’un BAAS passe en position d’alarme, tous les autres se déclenchent également.
Equipement d’alarme TYPE 4
Le Système de Sécurité Incendie (SSI) est un ensemble de matériels servant à collecter toutes les informations ou ordres liés à la seule sécurité incendie, à les traiter et à effectuer les fonctions nécessaires à la mise en sécurité de l’établissement. Les tableaux d’alarme incendie de type 4 que nous vous proposons sont prévus pour équiper des établissements nécessitant un SSI de catégorie E. Pour l’alarme incendie de type 4 (petits établissements), 3 choix sont possibles :
– Pour les petits locaux où 1 seul point de diffusion suffit: le système de sécurité incendie catégorie E à piles
– Pour les locaux où 3 points de diffusion sonore suffisent : le tableau d’alarme 1 boucle.
– Pour les locaux nécessitant jusqu’à 24 diffuseurs sonores : le tableau d’alarme 2 boucles.
Relais d’intensité
Le relais d’intensité est utilisé pour démarrer les Moteur asynchrone monophasé de faible puissance jusqu’à 600W. Il peut être utilisé avec ou sans condensateur de démarrage.
Le fonctionnement du relais d’intensité comme son nom l’indique varie en fonction de l’intensité, la forte intensité due au démarrage traverse l’enroulement permanent et génère un flux magnétique suffisant pour coller le contact et alimenter l’enroulement de démarrage. Lorsque le moteur est lancé et dès qu’il prend de la vitesse, l’appel d’intensité diminue, la force du champ magnétique de la bobine du relais diminue et le contact s’ouvre, l’enroulement de démarrage (enroulement auxiliaire) n’est plus alimenté, et le moteur continu à tourner avec l’enroulement principale (ou permanent).
Une vidéo sur youtube:
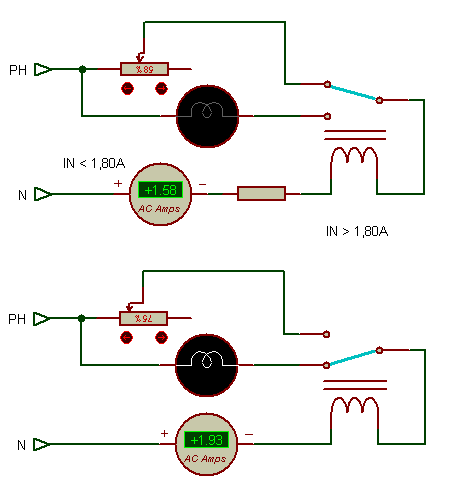
Relais thermique
Document technique ici
Le courant nominal circulant dans le circuit doit être d’environ 1,8A, lorsque celui-ci s’élève anormalement le bilame réagis en fonction de la température et celui-ci va venir ouvrir le circuit, ainsi la lampe s’allume.
Les causes de surintensités sont multiples parmi celles-ci on peut citer :
- Surcharge mécanique de la machine entraînée (augmentation du couple résistant),
- Surcharge mécanique du moteur lui-même (roulements à billes défectueux par exemple)
- Démarrage trop long (inertie importante de l’ensemble entraîné),
- Démarrage trop fréquent (pianotage),
- Marche en monophasée (coupure d’une phase suite à la fusion d’un fusible),
- Baisse de tension,
- Blocage au démarrage,
- Court-circuit.
Réglage correct du relais thermique:
C’est l’intensité nominale du moteur, un réglage supérieur ou inférieur est mauvais : trop bas, il ne permet pas la pleine utilisation du moteur, trop haut, le relais n’assure aucune protection. En général les relais thermiques sont compensés, en effet, un bilame de compensation se déforme en fonction de la température ambiante et apporte la correction nécessaire afin que le relais déclenche à l’intensité affichée.
Relais thermique simple
Le relais thermique doit laisser passer les surcharges, de démarrage ou en service normal, mais doit donner l’ordre de coupure dès que l’intensité atteint une valeur susceptible de mettre en danger le moteur. Le relais thermique est caractérisé par son intensité nominale In et il est réglable de 0,65 à 1In
Présentation
Il est évident que les réglages du déclencheur d’un disjoncteur ne se font pas à la légère. En règle générale les réglages font l’objet de règles précises que je vais développer ci-après. Ces réglages sont le résultat de la note de calculs conformes à la NFC 15-100 et de ses guides pratiques dont le principal est le guide UTE C15-105. Afin d’interpréter correctement les réglages d’un disjoncteur, il est indispensable de connaître la NFC 15-100 et les textes satellites dans le cas contraire c’est un coup d’épée dans l’eau.
Théories
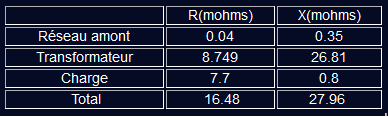
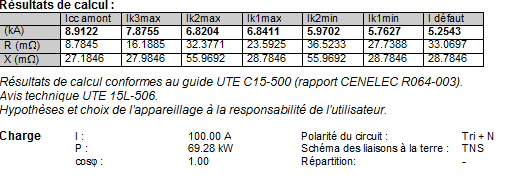
À l’aide du logiciel Ecodial (ancienne version), j’ai simulé une charge qui consomme un courant de 100A sous 230V, la longueur entre le transformateur et la charge est de 10m.
La charge consomme un courant de 13A Ib<=In => In=16A, le mode de pose étant la référence 11, Iz=16A (coef tous à 1), section de la phase est de 25mm² (tolérance 5%) et même chose pour le neutre.
Section PE <25mm² ce qui donne un PE=16mm² Rpe=12mohms Xpe=0.8mohms
Pour trouver le courant de court circuit Ik1 (Ph/Pe) à l’extrémté de la canalisation nous faisons:
racine ((Rtotal+Rpe)²+(Xtotal+Xpe)²)=racine ((16,48+12)²+(27,96+0,8)²)=40,475 mhoms
Icc=(V/Z)=230/40,475=5,68 kA (il faudra multiplier ces valeurs par des coefficient suivant le type de régime de neutre*m*Cmini).
Réglage du magnétique
Le réglage du magnétique ce fera au plus pres du courant de défaut If (proche de 5,68kA). Il convient également de prendre en compte l’incertitude de +20% sur le déclenchement du magnétique
Im(Isd)=X*5,68*1,02 (X: Correspond au nombre de fois le courant Ir le coefficient multiplicateur dépend de la technologie du disjoncteur (micrologic ou autres)).
Avec fusible
Lorsqu’on utilise des fusibles, il faudra regarder la courbe sur la doc technique de celui-ci.
