Monthly Archives: April 2016
Présentation
Je ne vais pas rentrer dans les détails puisqu’un exemple est évoqué ci-dessous:

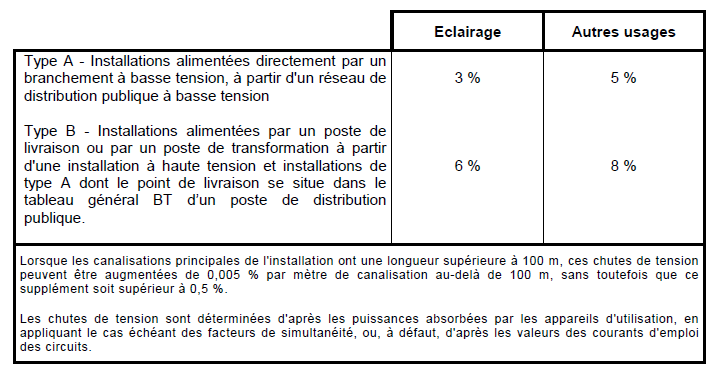
Ah oui!! j’avais oublié d’évoquer un règle à respecter. Si le pourcentage est supérieur aux valeurs indiquées ci-dessous il faudra augmenter la section du câbles, bien évidemment si la longueur est importante la chute de tension est aussi importante. Afin d’obtenir une faible chute de tension il faut donc “jouer” sur la section du câble ou bien de diminuer la longueur mais ça c’est à vous de voir…
Présentation
Dans ce présent article nous allons aborder le calcul du courant de défaut, qui permet de régler le magnétique du disjoncteur voir Réglage disjoncteur
Protection contre les contacts indirects
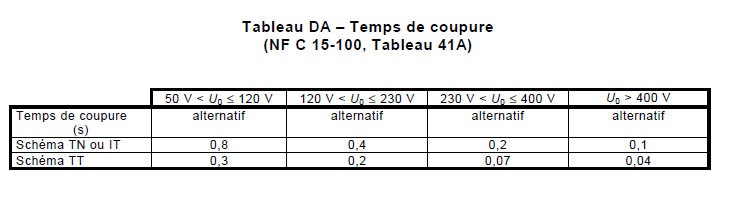
Le courant de défaut entre phase et masse – ou entre un conducteur de phase et le conducteur de protection – doit être éliminé dans un temps compatible avec la sécurité des personnes.
Ce temps est déterminé par une courbe en fonction de la tension de contact présumée, basé sur les effets physiologiques du courant électrique sur le corps humain voir
Protection contre les risques du courant électrique
Application au schéma TN
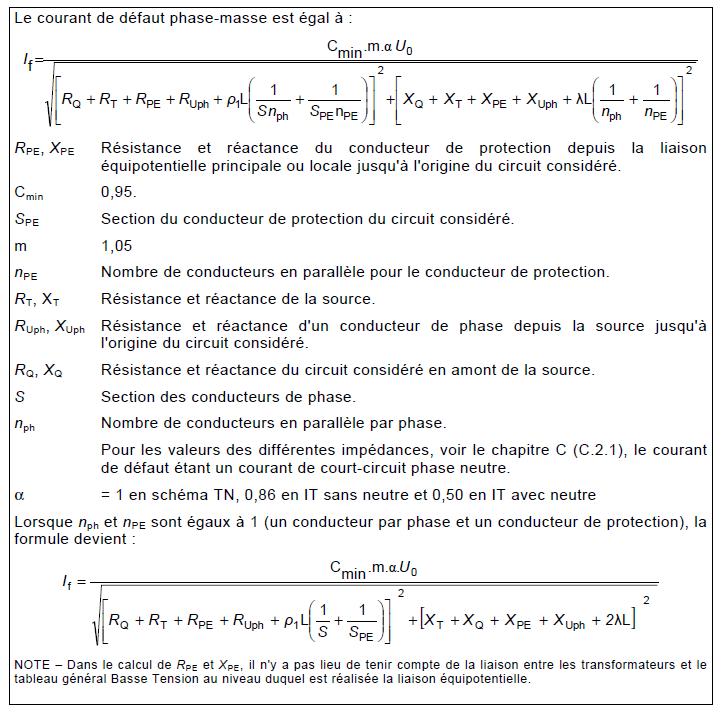
Le courant de défaut If est égal à :
If=U0/Zd
U0 étant la tension nominale de l’installation entre phase et neutre,
Zs étant l’impédance de la boucle de défaut.
Protection par fusibles
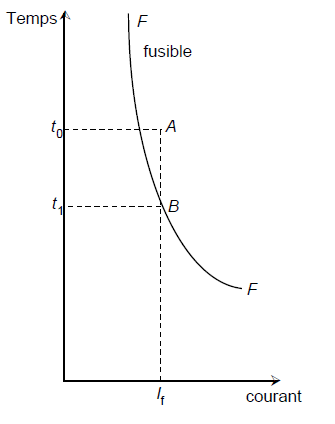
La règle de protection consiste alors à s’assurer que le courant de défaut If provoque certainement la fusion du fusible dans le temps prescrit, en vérifiant que le point correspondant du graphique de fonctionnement des fusibles I(t) se trouve au-dessus de la caractéristique supérieure de la zone de fusion du fusible.
Le point A correspondant au temps t0 prescrit pour le courant de défaut If doit se trouver au-dessus de la limite supérieure de la zone de fonctionnement du fusible (FF). t1 est le temps réel de fusion du fusible résultant du courant de défaut If.
Protection par disjoncteurs
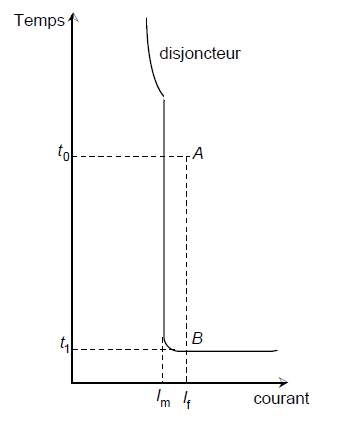
Lorsque le dispositif de protection est un disjoncteur, il suffit de s’assurer que le courant de défaut If est au moins égal au plus petit courant Im assurant le fonctionnement instantané ou de court-retard du disjoncteur ; en effet, les temps de fonctionnement des disjoncteurs sont généralement inférieurs aux temps prescrits.
Si If est supérieur ou égal à Im, la protection est assurée.
Si If est inférieur à Im., il y a alors lieu, soit de diminuer le courant de fonctionnement instantané Im ou de court retard du disjoncteur (réglage du magnétique) si cela est possible, soit de réaliser des liaisons équipotentielles supplémentaires satisfaisant à la condition du paragraphe 415.2 de la NF C 15-100 telles que la résistance R entre toute masse et tout élément conducteur simultanément accessibles soit telle que :
R ≤ 50/Im
soit d’assurer une protection par des dispositifs à courant différentiel-résiduel de courant différentiel-résiduel assigné IΔn ≤ If.
Des disjoncteurs sélectifs peuvent être utilisés dans les circuits de distribution.
Si le courant de défaut If est supérieur au plus petit courant assurant le fonctionnement instantané du disjoncteur Im’ le temps de fonctionnement instantané ou de court-retard t1 du disjoncteur est nettement inférieur au temps t0 prescrit..
Méthodes de calcul
Présentation
Ce présent article à pour principe d’expliquer comment déterminer la section des conducteurs dans une installation électrique en industrie .
Pertes par effet joules
Les câbles électriques sont généralement en cuivre, un métal considéré comme un excellent conducteur. Ce constat est a priori vrai sur les courtes distances, mais dès que la longueur
devient importante, la perte par effet Joule (échauffement) n’est pas négligeable surtout pour de fortes intensités. Une installation électrique nécessite plusieurs types de conducteurs pour transporter le courant du tableau général aux différents points d’utilisation. Entre les uns et les autres, le choix est avant tout une question de normes.
Comment dimensionner un conducteur
La détermination de la section du conducteurs doit correspondre à un courant admissible au moins égal à :
I’z=k/f
I’z correspond aux courant fictif qui traverse le conducteur
k une constante qui dépend en fonction du type d’appareillages utilisé
- Si Fusibles gG : I’z=(K3*In)/f
- Si disjoncteur domestiques : I’z=In/f
- Si disjoncteur industriels : I’z=Ir/f
f correspond à un coefficient qui dépend de (température/pose des conducteurs/méthode de référence/…)
Logiciel Ecodial
Nous allons utiliser le logiciel Ecodial pour simuler une installation électrique et verrons en détails comment celui-ci a fait ses calculs en utilisant la normes UTE C15-105. Il faut savoir que Ecodial ne prend pas tout les facteurs en comptes car beaucoup de paramètres peuvent exister, Ecodial (en mode automatique) va se contenter d’apporter un calcul simple afin d’avoir une approche sur la section du ou des conducteurs à mettre en place.
Calcul section de la Phase
Prenons un cas ou nous souhaitons installer un câble monophasé:
Type d’isolant : PR2 (2 car monophasé)
Type de conducteur : unipolaire
Longueur : Longueur du câble 100m
Température : 40°C – facteur de correction f1=0,85
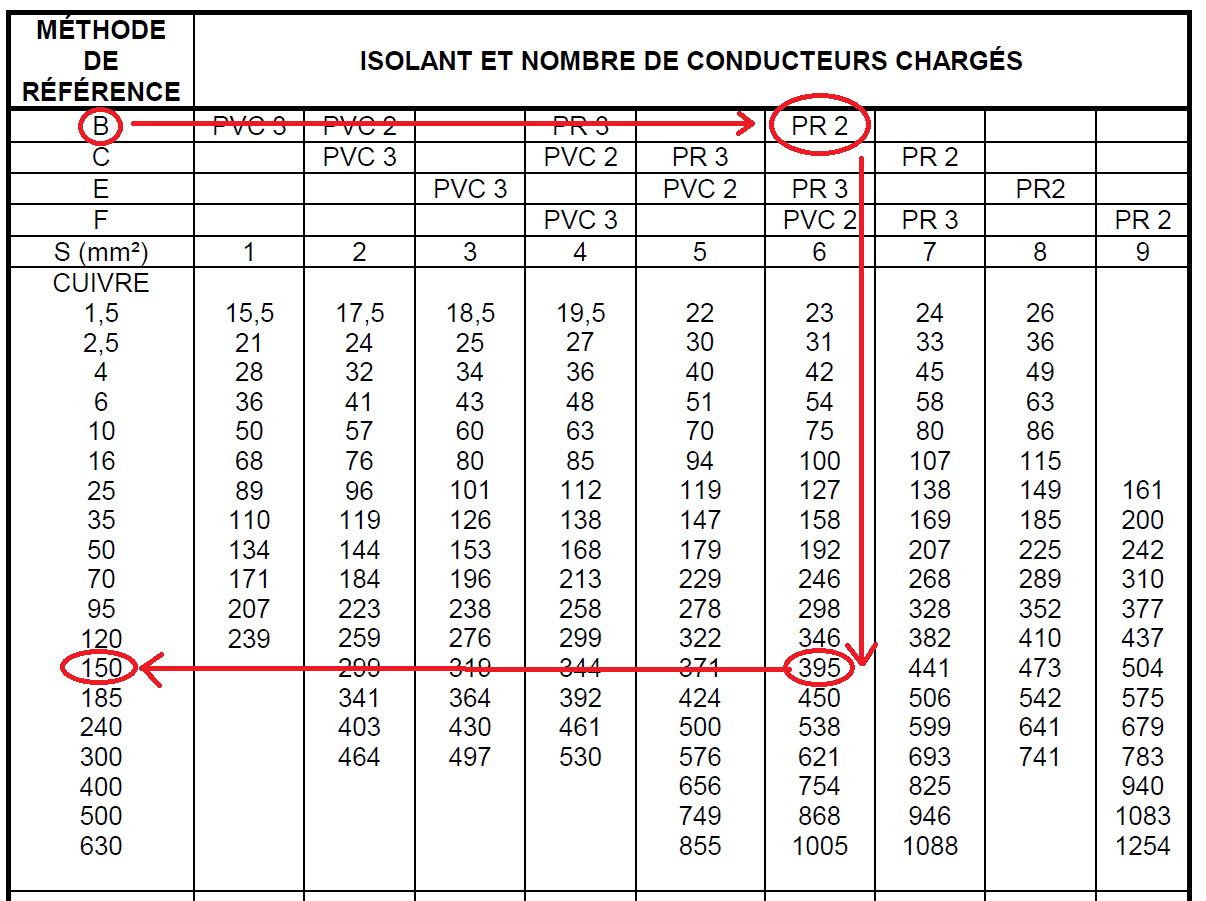
Mode de pose : Câbles mono- ou multiconducteurs dans des conduits-profilés en montage apparent – méthode de référence B – facteur de correction f2=0,90
Neutre chargé : non (pas d’harmoniques)
Arrangement conducteurs (pose jointive): 7 circuits jointifs référence 1 facteur de correction f3=0,55
Nombres de couches : 3 facteur de correction f4=0,73
f=f1*f2*f3*f4=0,85*0,90*0,55*0,73=0,307
Pour un courant du disjoncteur réglé à Ir=0,7xIn=112A
I’z=Ir/f=1120,307=365A
Ainsi pour un courant fictif on trouve d’après le tableau une section de 150mm² pour la phase.
Calcul section du Neutre
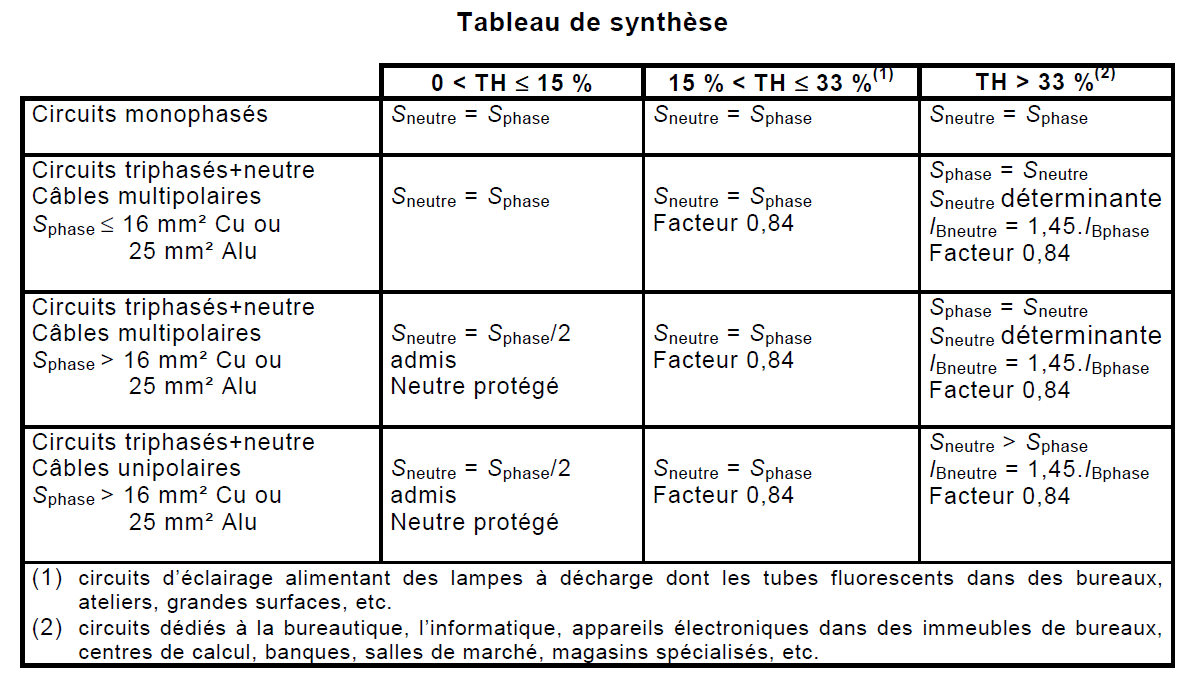
Le conducteur neutre doit avoir une section supérieure à celle des conducteurs de phase dans le cas de circuits polyphasés constitués de câbles unipolaires et lorsque le taux d’harmoniques en courant de rang 3 et multiple de 3 dépasse 33 %. La section déterminante est celle du conducteur neutre calculée pour un courant d’emploi pris égal à 1,45 fois le courant d’emploi dans la phase. Le conducteur neutre est considéré comme chargé et un facteur de réduction du courant admissible de 0,84 doit être pris en compte.
Dans le cas de circuits triphasés avec neutre et lorsque le taux d’harmoniques en courant de rang 3 et multiple de 3 n’est défini ni par l’utilisateur ni par l’application, il est recommandé que le
concepteur applique au moins les règles suivantes :
• prévoir une section du conducteur neutre égale à celle de la phase (facteur 0,84) ;
• protéger le conducteur neutre contre les surintensités ;
• ne pas utiliser de conducteur PEN.
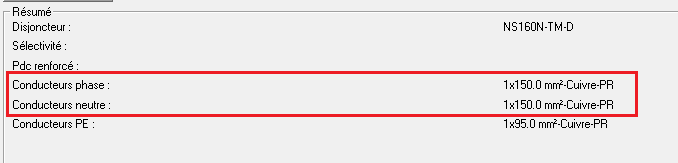
Dans notre exemple le neutre n’est pas chargé (aucune présence d’harmoniques), il en résulte que le conducteur neutre est égale au conducteur de phase c’est d’ailleurs ce que nous trouve Ecodial.
Calcul section du PE (Protection Electrique)
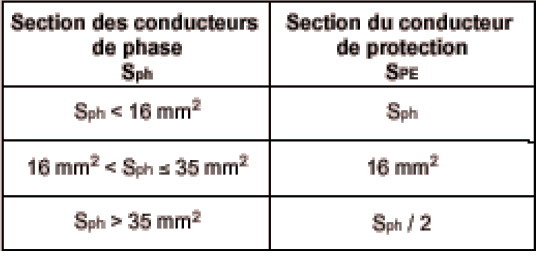
Rien de bien compliqué encore, il suffit de respecter les données du tableau ci-dessus.Dans notre exemple la section du conducteur de phase est bien supérieur à 35mm², et donc la section du conducteur PE est donc égale à Sph/2=150/2=75mm² (valeur normalisée 95mm²), c’est bien ce que Ecodial nous préconise!!
Présentation
Il est évident que les réglages du déclencheur d’un disjoncteur ne se font pas à la légère. En règle générale les réglages font l’objet de règles précises que je vais développer ci-après. Ces réglages sont le résultat de la note de calculs conformes à la NFC 15-100 et de ses guides pratiques dont le principal est le guide UTE C15-105. Afin d’interpréter correctement les réglages d’un disjoncteur, il est indispensable de connaître la NFC 15-100 et les textes satellites dans le cas contraire c’est un coup d’épée dans l’eau.
Conditions à respecter
Trois conditions sont à respecter pour qu’un dispositif de protection assure la protection d’une canalisation contre les surcharges :
* Condition 1) IB ≤ In
* Condition 2) In ≤ lz
* Condition 3) I2 ≤ 1,45.lz qui peut s’écrire k2.ln ≤ 1,45 lz ou k3.ln ≤ lz ou In ≤(Iz/k3)
IB Courant d’emploi,
In Courant assigné du dispositif de protection ; pour les dispositifs de protection réglables, In est le courant de réglage choisi (Ir),
I2 Courant de fonctionnement du dispositif de protection dans le temps conventionnel,
Iz Courant admissible dans la canalisation, compte tenu des facteurs de correction éventuels,
k2 Rapport du courant I2 assurant effectivement le fonctionnement du dispositif de protection à son courant nominal In,
k3 = k2/1,45.
Fusible
pour les fusibles, les deux conditions à respecter sont les suivantes :
Condition 1a) IB ≤ In
Condition 2) I2 ≤ 1,45.lz ou In ≤(Iz/K3) ou k3 In ≤ Iz
Le facteur k3 ayant les valeurs suivantes :
In < 16 A, k3 = 1,31
Fusibles gG
In ≥ 16 A, k3 = 1,10
Disjoncteur
Pour les disjoncteurs, les deux conditions à respecter sont les suivantes :
Condition 1a) IB ≤ In
Condition 1b) In ≤ lz
Les caractéristiques fondamentales d’un disjoncteur on parlera de la taille du disjoncteur qui correspond au courant assigné (In) le plus élevé des déclencheurs qui peuvent l’équiper.
Réglages thermique
Comme évoqué ci-dessus, le réglage In est choisi en affinant avec Ir (courant de réglage), il en résulte que le choix du disjoncteur doit être au plus proche ou égale au courant d’emploi que consomme la charge en aval, il protège contre les surcharges.
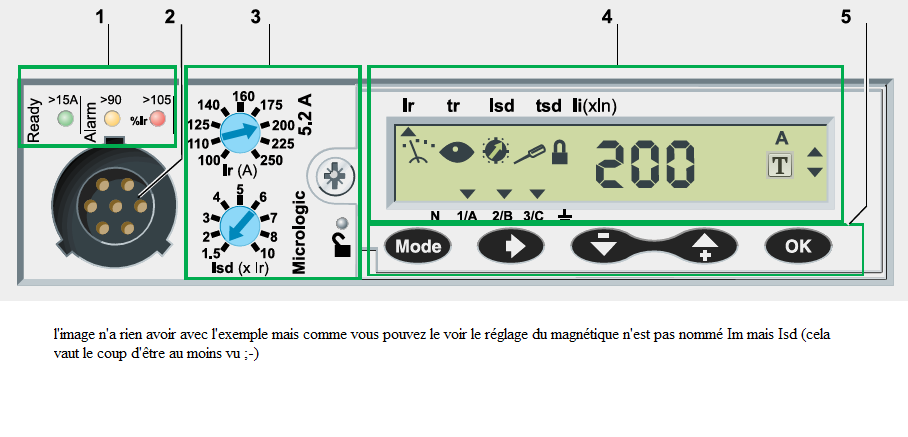
Réglages magnétique
Réglage du magnétique
Le réglage du magnétique ce fera au plus prés du courant de défaut If . Il convient également de prendre en compte l’incertitude de +20% sur le déclenchement du magnétique
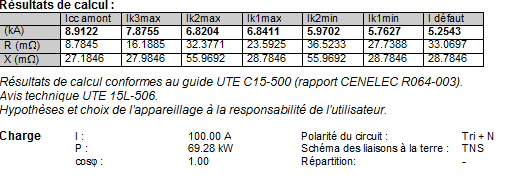
À l’aide du logiciel Ecodial (ancienne version), j’ai simulé une charge qui consomme un courant de 100A sous 230V, la longueur entre le transformateur et la charge est de 10m.
La charge consomme un courant de 100A Ib<=In => In=100A, le mode de pose du câble en prenant en compte toutes les contraintes donne un coeff f= 1, il en résulte que Iz=Ir(In)/f=100/1 Iz=100A.
La section de la phase est de 25mm² (tolérance 5%) et même chose pour le neutre.
Section PE < 25mm² ce qui donne un PE=16mm² Rpe=12mohms Xpe=0.8mohms
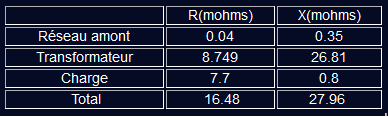
Pour trouver le courant de court circuit Ik1 entre phase et protection électrique à l’extrémité de la canalisation nous faisons:
racine ((Rtotal+Rpe)²+(Xtotal+Xpe)²)=racine ((16,48+12)²+(27,96+0,8)²)=40,475 mhoms
Icc=(V/Z)=230/40,475=5,68 kA (il faudra multiplier ces valeurs par des coefficient suivant le type de régime de neutre*m*Cmini).
Réglage du magnétique
Le réglage du magnétique ce fera au plus près du courant de défaut If (proche de 5,68kA). Il convient également de prendre en compte l’incertitude de +20% sur le déclenchement du magnétique
Im(Isd)=X*5,68*1,02
X: Correspond au nombre de fois le courant Ir le coefficient multiplicateur dépend de la technologie du disjoncteur (micrologic ou autres)
1,02: correspond à la tolérance de +20%.
Si par exemple nous avons une boucle de défaut (impédance de la boucle Zd=27miliOhms), et que nous trouvons par calcul un courant de 6000A!!!
il faudra régler le magnétique afin d’obtenir Im<=(If/1,2)=6000/1,2=5000 soit 5kA (le réglage du magnétique doit être inférieur à 5kA. (voir courbe du disjoncteur en bas).
Avec fusible
Lorsqu’on utilise des fusibles, il faudra regarder la courbe sur la doc technique de celui-ci.
Exemple
Prenons un exemple simple ou l’on considère que nous voulons alimenter une charge entre phase et neutre (230V 50Hz), et que cette charge consomme un courant de 500A sous un Cos Fi=0,85.
Avec ces éléments nous pouvons en calculer la puissance qui est: P=U*I*Cos Fi=230*500*0,85=97750W soit 97,86KW.
Thermique= réglage long retard (Protection contre les surcharges)
Afin de protéger cette charge nous devons mettre en place le disjoncteur de ligne qui devra être réglé au plus près du courant nominal de la charge Ir=500A. Si on respecte la norme UTE C15-105, celle-ci indique clairement que le courant de réglage du disjoncteur (Ir) Ir ≥ Ib (Ib correspond au courant nominal ou courant d’emploi qui circule dans la charge).Ir ≥ 500A,
il faudra donc trouver un disjoncteur supérieur ou égale à 500A. La gamme Compact de Scheider electric propose une large gamme de disjoncteur comme le NS630N qui admet un courant In=630A, l’appareil peux donc accepter et laisser passer un courant de 630A, mais aussi il est équipé d’une micrologie qui permet de régler Ir (Thermique) ainsi que Im (Magnétique)

Le réglage du thermique se fera à 0,8xIn soit Ir=0,8×630=504A Ir ≥ Ib on respect bien la norme et nous somme proche des 500A!! (le faite de régler le thermique nous allons affiner pour être encore plus proche du courant Ib (courant nominal ou d’emploi de la charge))
Maintenant que le thermique est réglé il faut régler le magnétique qui celui-ci est réglé en fonction du courant de défaut (courant de court-circuit).
Magnétique = réglage court-retard (Protection contre les courts-circuits)
Le réglage du magnétique du disjoncteur est toujours effectué en prenant en compte d’une part le courant de défaut (If) (C’est en règle générale le cas le plus défavorable) et d’autre part l’incertitude sur le fonctionnement du magnétique (+20%), le magnétique protège contre les courts-circuits, il s’agit du courant de défaut simple (Schéma TT ou TN) ou de double défaut (Schéma IT) et le déclenchement au 1er défaut est obligatoire!! les dispositifs de protection contre les court-circuit doivent couper l’alimentation dans un temps inférieur à celui indiqué par les courbes de sécurité. Ensuite il suffit de connaître l’impédance de la boucle de défaut , pour cela revoir l’explication situé dans le paragraphe “Réglage du magnétique” d’ailleurs le réglage du magnétique est effectué grâce à cette formule Im<=(If/1,2)
Courbe du disjoncteur
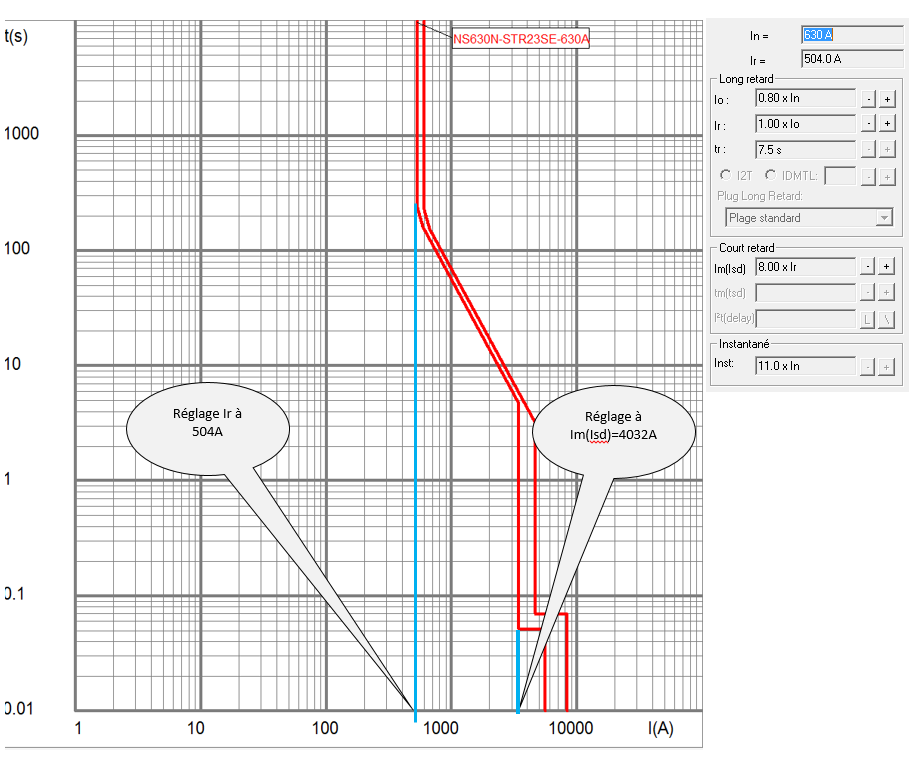
Le réglage du magnétique est bien inférieur à 5kA
Présentation
Toute protection quelle qu’elle soit protège le moteur uniquement lorsque celui-ci subit une action extérieure provoquant l’échauffement excessif des enroulements : moteur qui force exagérément, mauvaise ventilation, alimentation en tension anormale.Un amorçage entre enroulements fera déclencher la protection, mais n’empêchera absolument pas sa progression. En clair lorsque la protection aura sauté il est déjà trop tard pour les enroulements qui sont donc HS. Si on prend l’exemple d’un moteur qui a pris l’eau, si le différentiel ne déclenche pas immédiatement, la protection thermique ne déclenchera que lorsque le moteur aura « amorcé ».
Lorsqu’ un moteur a grillé malgré la protection c’est :
– Soit que cette protection n’était pas efficace, du à un mauvais réglage ou un avachissement de la languette de déclanchement
– Soit que ce soit un amorçage entre enroulements, mais dans tous les cas la protection doit être changée, que l’on remplace le moteur ou qu’on le fasse rebobiner.
La protection d’un moteur peut–être :
– Interne : protection thermique, sonde thermique, fusible thermique
– Externe : relai thermique, disjoncteur thermique
Protection par Thermique Interne
Le principe de fonctionnement est celui d’un bilame qui réagit en fonction de la température des enroulements, consignée par le fabricant du moteur. Celui-ci est isolé et placé à l’intérieur du moteur sur les enroulements. Cette protection est plutôt réservée aux moteurs ne dépassant pas 0,75Kw et uniquement pour les moteurs monophasés (pompes, tondeuses, etc.).
Le contact est un NF (Normalement fermé,et donc à froid laisse passer le courant). Le branchement est donc en série sur un fil secteur et le point commun des enroulements du moteur. Les contacts de cette protection thermique sont donc suffisamment dimensionnés pour laisser passer l’intensité que consomme le moteur. L’intérêt de ce montage est d’avoir une protection incorporée et de pouvoir brancher directement le moteur avec un simple interrupteur. L’inconvénient est que lorsqu’il y a surchauffe, le bilame ouvre le contact et le moteur s’arrête. Une fois le moteur refroidi le bilame se remet à sa position initiale et le moteur repart. Si l’utilisateur de l’appareil n’est pas présent (pompe par exemple) le cycle de marche/arrêt se poursuit indéfiniment jusqu’à l’avachissement ou soudage du bilame de la protection ou du claquage du moteur.
Si par chance c’est le bilame qui a claqué , il suffit de le court-circuiter et mettre une protection thermique extérieure (relai thermique ou disjoncteur).
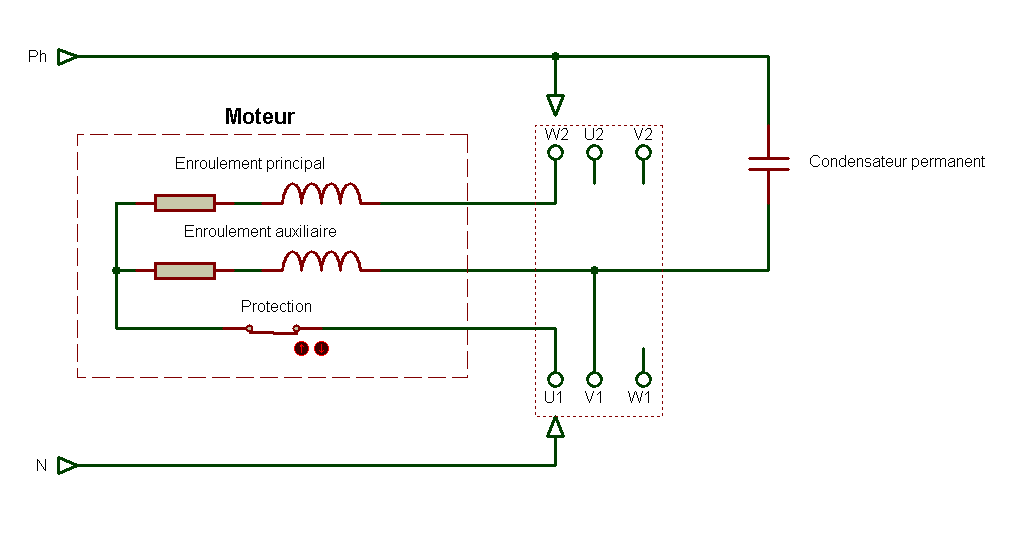
Schéma
Exemple de câblage de protection thermique interne, le branchement des sorties de fils du stator à la plaque à bornes n’est pas standard et chaque fabricant utilise les bornes repérées suivant sa propre logique. Avant toute intervention il faut s’assurer du repérage des circuits avec un ohmmètre. Le dessin ci-dessous permet de distinguer clairement les différents circuits. L’exemple est le cas le plus courant du moteur monophasé à condensateur permanent à 3 ou 4 fils de sorties avec le sens de rotation pré configuré.
Moteur à 3 fils de sorties.
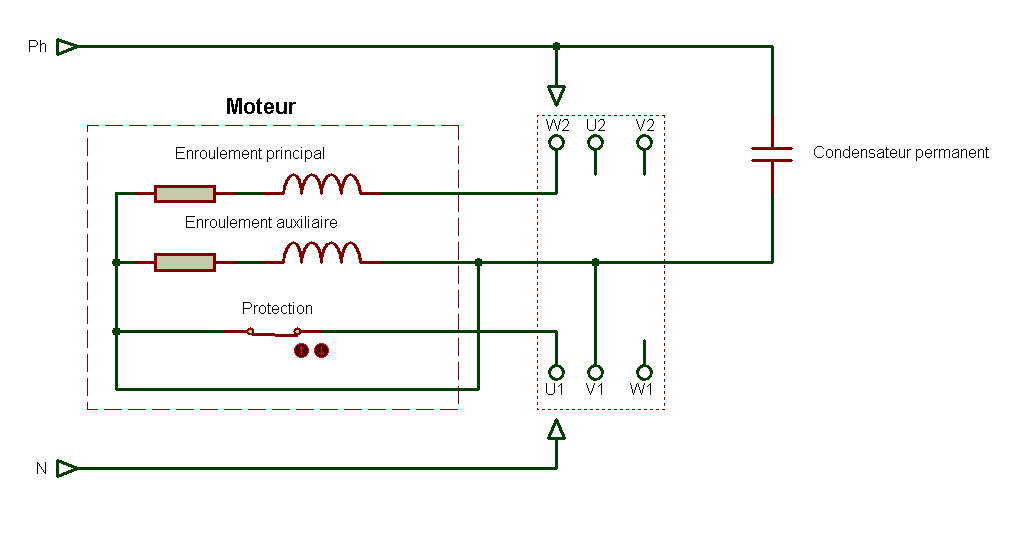
Sur le schéma électrique suivant le moteur a 4 fils de sorties, L’intérêt est de pouvoir supprimer la protection en cas de défaillance, en n’oubliant pas toutefois de mettre une protection extérieure par disjoncteur/moteur calibré.
Moteur à 4 fils de sorties..
Autre montage, si la protection est en bon état c’est de faire un montage dont la protection devient simplement une sonde thermique.
Moteur à 5 fils de sorties.

Principe de la sonde thermique (thermistance)
Protections thermiques incorporées
Les moteurs peuvent être équipés en option de sondes thermiques; ces sondes permettent de suivre l’évolution de la température aux “points chauds” afin de détecter la surcharge ou un mauvais refroidissement (ou à des points caractéristiques) pour la maintenance de l’installation.Il faut souligner qu’en aucun cas, ces sondes ne peuvent être utilisées pour réaliser une régulation directe des cycles d’utilisation des moteurs.
En contrôlant directement la température des enroulements statoriques, les relais à sondes protègent les moteurs contre les échauffements quelle qu’en soit l’origine (surcharge, élévation de la température ambiante, défaut du circuit de ventilation, fréquence de démarrage trop élevée,marche par à-coups, ……). Ce mode de protection ne peut être utilisé que si des sondes ont été incorporées aux enroulementslors de la fabrication du moteur (ou du rebobinage de celui-ci).Les relais à sondes peuvent également être utilisés pour surveiller les échauffements des organes mécaniques des moteurs ou d’autres matériels susceptibles de recevoir une sonde (paliers, circuits de graissage, radiateurs de semi-conducteurs, fluides de refroidissement, résistances de démarrage,…).
Ce système de protection contrôle la température réelle de l’élément à protéger.Il est composé:
– d’une ou plusieurs sondes à thermistances à coefficient de température positif (PTC) (composant statique dont la résistance augmente brutalement quand la température atteint un seuil prédéfini
nommé Température Nominale de Fonctionnement «TNF»). – d’un dispositif électronique qui mesure en permanence la résistance des sondes.
Un tableau ci-dessous permettant de montrer différentes sonde thermique incorporées dans le moteur
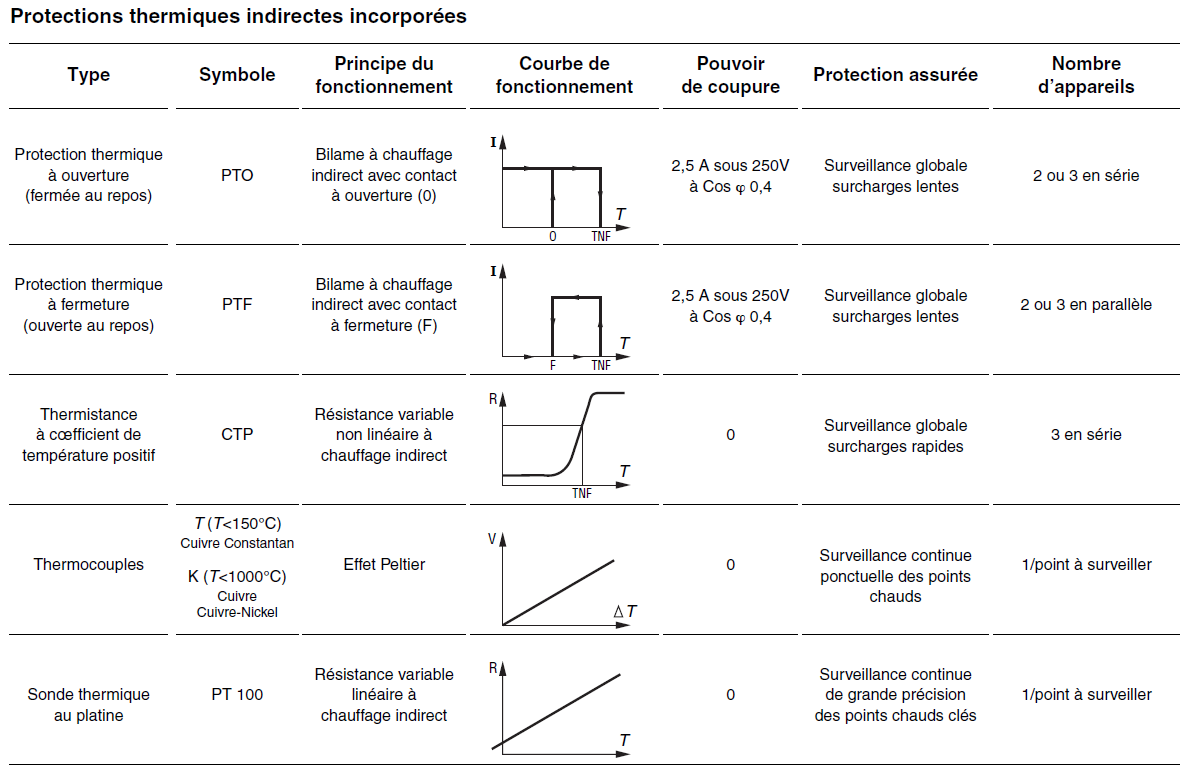
(Clique pour agrandir)
Montage des différentes protections
– PTO ou PTF, dans les circuits de commande.
– CTP, avec relais associé, dans les circuits de commande.
– PT 100 ou Thermocouples, avec appareil de lecture associé (ou enregistreur), dans les tableaux de contrôle des installations pour suivi en continu.
Lorsque le moteur comporte des accessoires (protection thermique ou résistance de réchauffage), ceux-ci sont raccordés sur des dominos à vis ou des planchettes par des fils repérés
Fonctionnement de la sonde thermique
Ce sont des résistances dont la valeur ohmique varie avec la température. En principe, ces dispositifs ne sont pas utilisés seuls, ils doublent les relais utilisant le courant absorbé comme moyen de mesure, mais la surcharge due à l’échauffement d’un palier est, en principe, insuffisante pour être détectée par les relais de surcharge, d’Où la nécessité d’intégrer une sonde thermique.

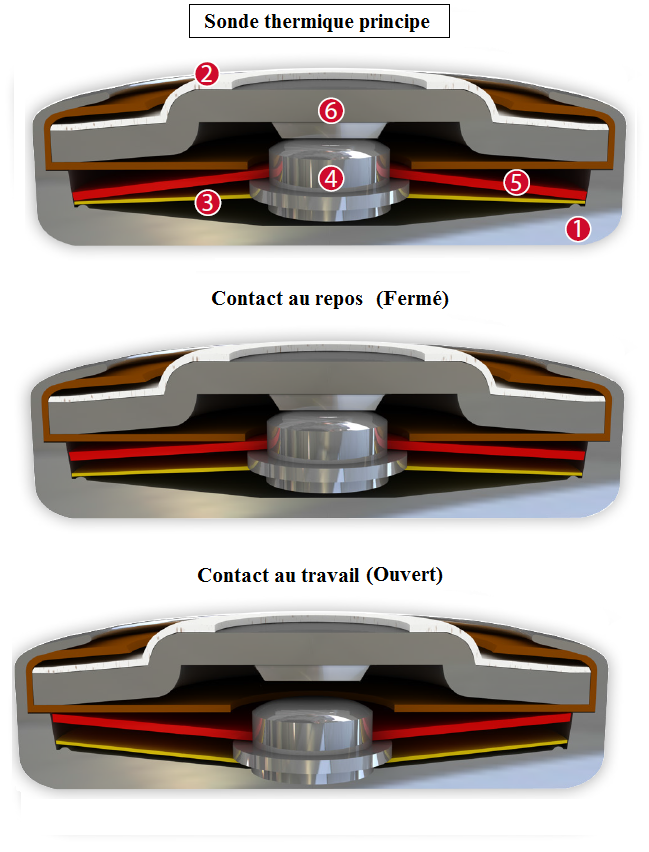
L’appareillage est constitué d’un d’un boîtier conducteur (1) et d’un capuchon de contact qui est constitué d’acier (2), qui celui-ci est isolée du capuchon. Un contact intégré d’argent fixe (6) qui ferme le boîtier comme une pile bouton. Il reste le disque (3) qui forme l’élément de transfert de courant qui est le contact mobile (4)
Le fonctionnement est le suivant
lorsque la température augmente le disque bimétallique(5) va se déformer en exerçant une pression de contact constante, stable. Le disque bimétallique (5) est un contact mobile qui fait monter ou descendre (4) sans se coller et sans avoir à ce souder. En tant que tel, il peut toujours travailler et réagit seulement à la température ambiante dans l’appareil à protéger. Quand la température de commutation nominale est atteinte, le disque bimétallique (5) va se mette en sa position inversée et pousse le ressort d’encliquetage disque (3) vers le bas. Ainsi le contact est brusquement ouverte et la montée du dispositif de température est est perturbée. Si la température ambiante tombe, le disque bimétallique (5) retourne dans sa position de départ , et le contact est à nouveau fermé.
Dernière mise à jour le 16/04/16
Présentation
Le programme ci-dessous permet d’afficher toutes les 100ms la position du curseur de la souris. Le timer1 permet de scruter en boucle le positionnement de la souris et d’afficher ces valeurs dans une TextBox.
Programmation en C#
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
namespace Curseur_Souris
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
}
private void button1_Click(object sender, EventArgs e)
{
timer1.Enabled = true;
timer1.Start(); //Active le timer1
}
private void button2_Click(object sender, EventArgs e)
{
timer1.Stop(); //Arrêt du timer1
}
private void timer1_Tick(object sender, EventArgs e)
{
// Toutes les 100ms le timer scrute en boucle la ligne de code ci-dessous
textBox1.Text = Convert.ToString( Cursor.Position.X );
textBox2.Text = Convert.ToString( Cursor.Position.Y);
}
private void textBox1_TextChanged(object sender, EventArgs e)
{
//Affichage de l'axe des X
}
private void textBox2_TextChanged(object sender, EventArgs e)
{
//Affichage de l'axe des Y
}
}
}
|
Pour l’utiliser vous pouvez ouvrir le programme (.exe) situé sur ce lien Curseur souris
